

Industrial robot design and verification-oriented simulation platform and method
An industrial robot and simulation platform technology, applied in computer-aided design, instrumentation, calculation, etc., can solve the problems of not covering the whole process of robot design, not being able to support the design stage, and insufficient engineering practicability, so as to improve the efficiency and quality of R&D design , reduce development costs, and have strong engineering practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
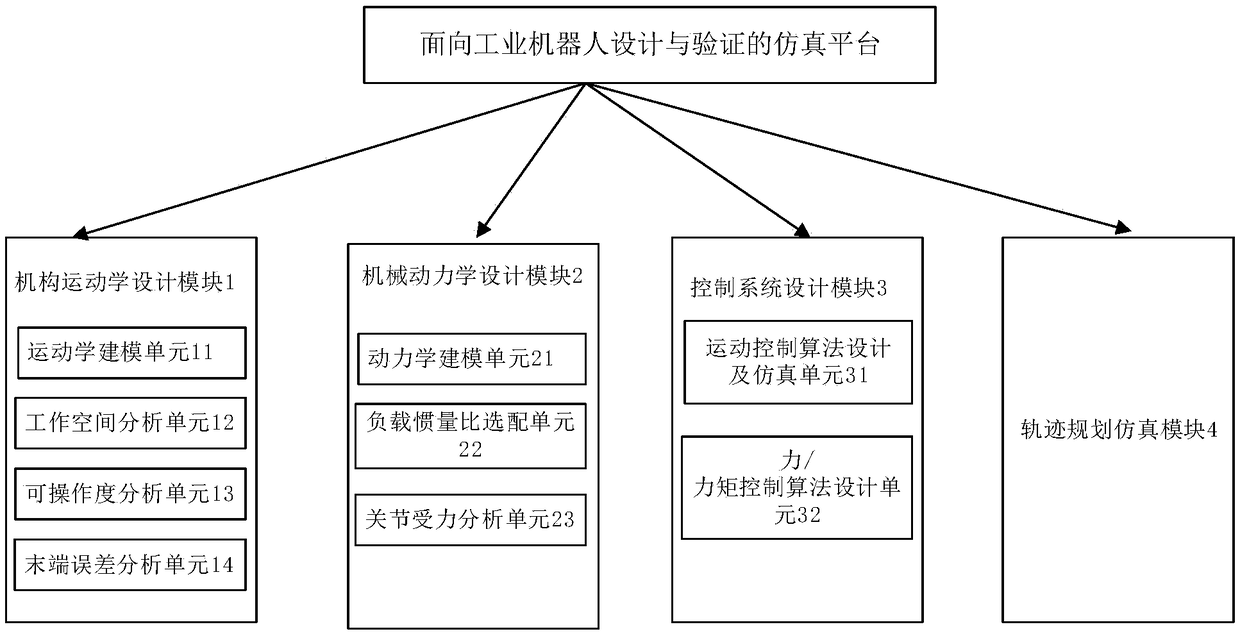
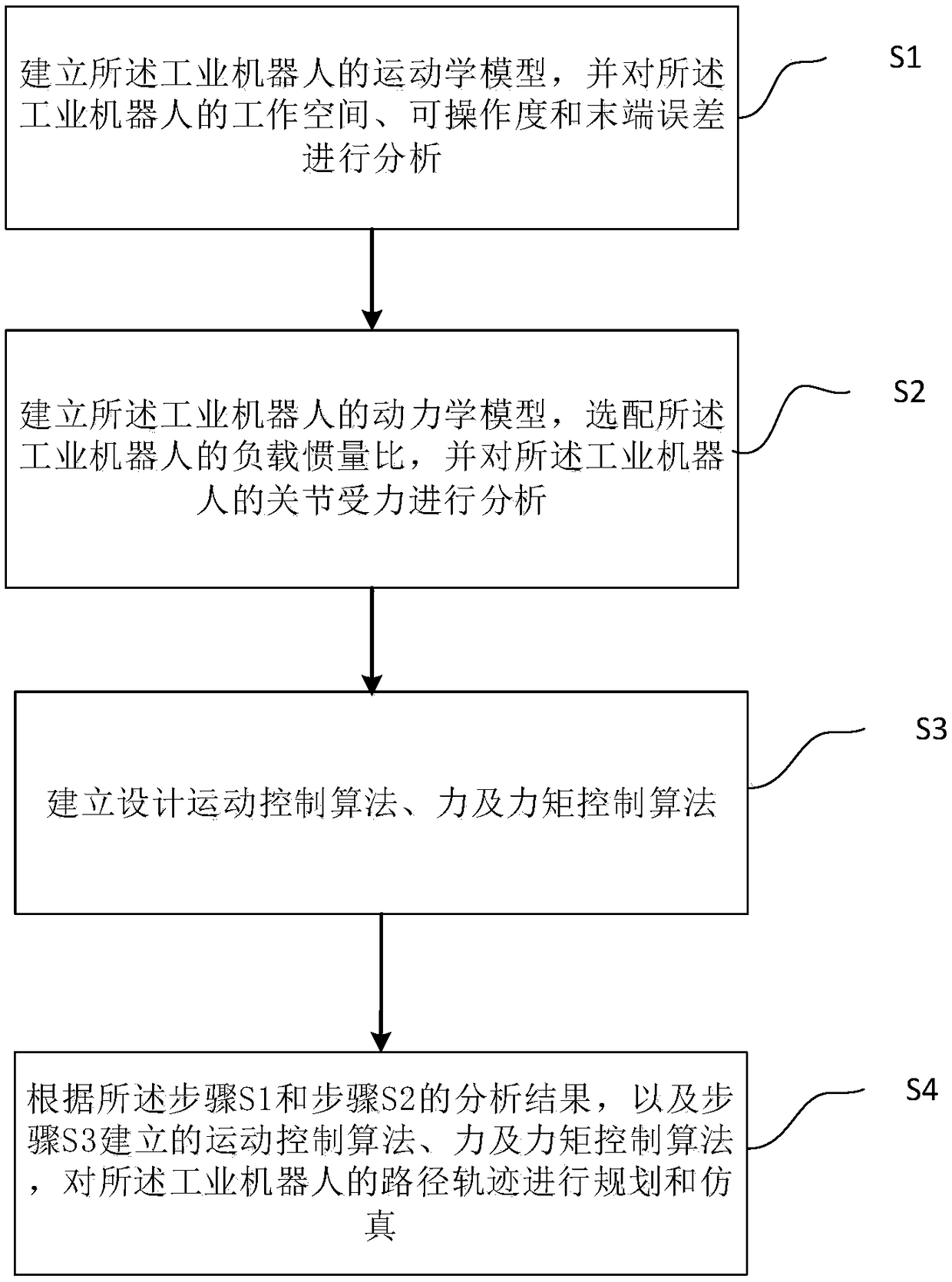
[0037] The invention proposes a simulation platform and method for industrial robot design and verification, which can evaluate various design indicators and guide the selection and optimization of parameters in the initial design stage of industrial robots.
[0038] The simulation platform and method of the present invention realize the design and verification of industrial robot schemes based on the Matlab / Simscape environment. The platform and method cover the design and verification requirements of the whole process of robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More