

Multi-degree-of-freedom bionic jellyfish robot
A technology of robot and degree of freedom, applied in the field of bionic robots, can solve the problems of task execution troubles, disturbing underwater creatures, and inflexible operation, and achieve the best movement flexibility, simplified structure, and flexible operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
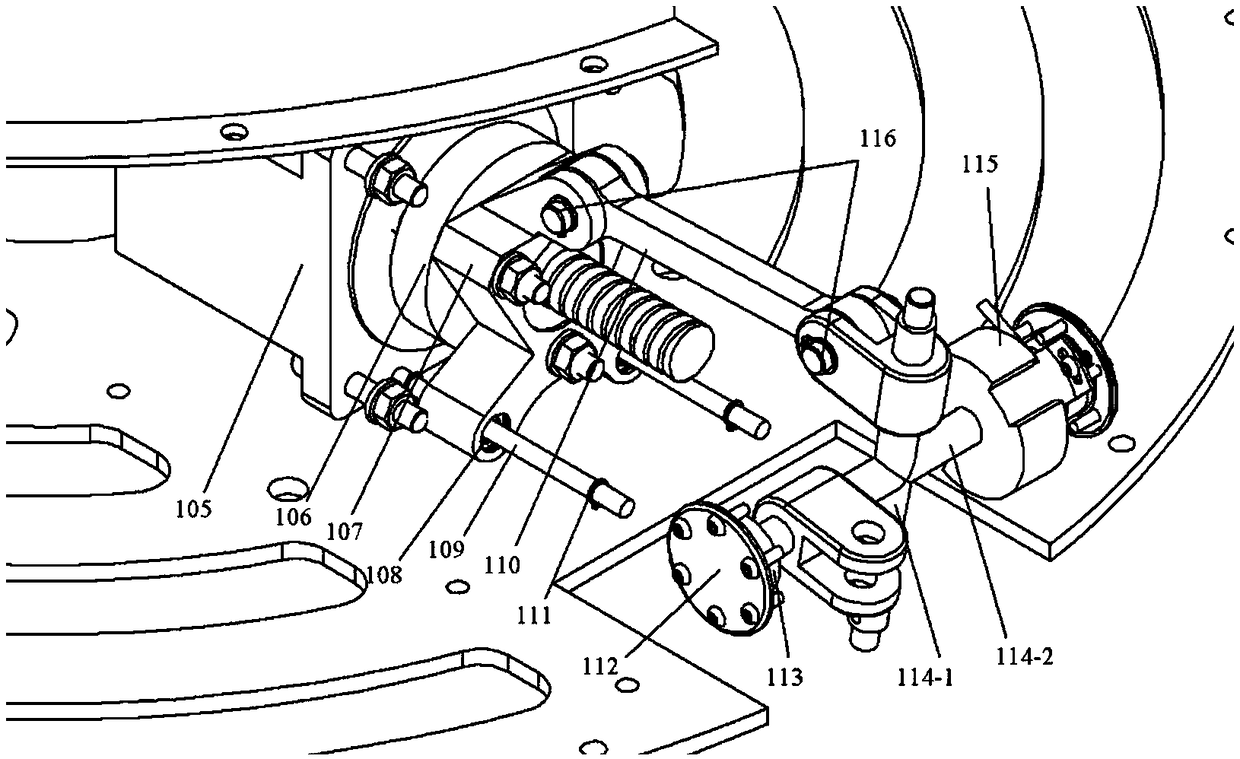
[0027] As an implementation, the first drive mechanism includes a first linear screw stepper motor 105, a first screw nut 106, a first nut sleeve 107, and a first linear guide rail 109; the first linear The screw stepper motor 105 is fixed in the matrix 100; the first screw nut 106 is connected to the screw shaft of the first linear screw stepper motor 105, and the two form a screw pair; the first nut cover 107 is fixed Outside the first screw nut 106; the first nut cover 107 is provided with two guide holes, and a first linear guide rail 109 is respectively arranged in the two guide holes; two ends of the first linear guide rail 109 respectively fixedly connected with the fixed seat 102; the axial direction of the first linear guide rail 109 is parallel to the axial direction of the screw axis of the first linear screw stepping motor; one end of the first connecting rod 110 is connected to the first Nut sets 107 are connected. The first linear screw stepping motor 105 drives...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More