Multi-vehicle-type unmanned aerial vehicle debugging platform and method
A UAV and platform technology, applied in the field of multi-model UAV debugging platform, can solve problems such as excessive UAV restrictions, flight test impact, parameter impact, etc., to ensure life safety, wide range of use, wide range The effect of suitability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
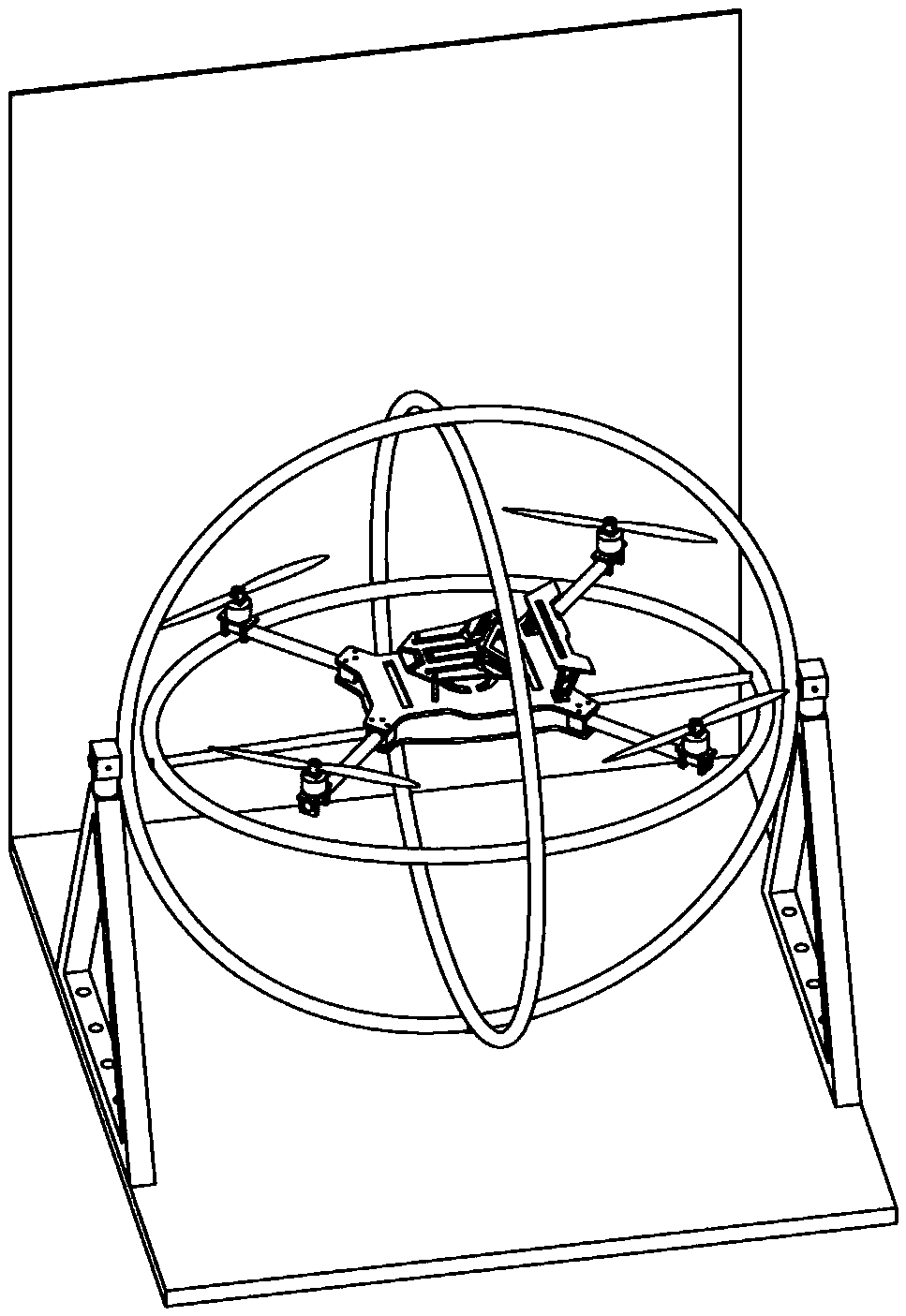
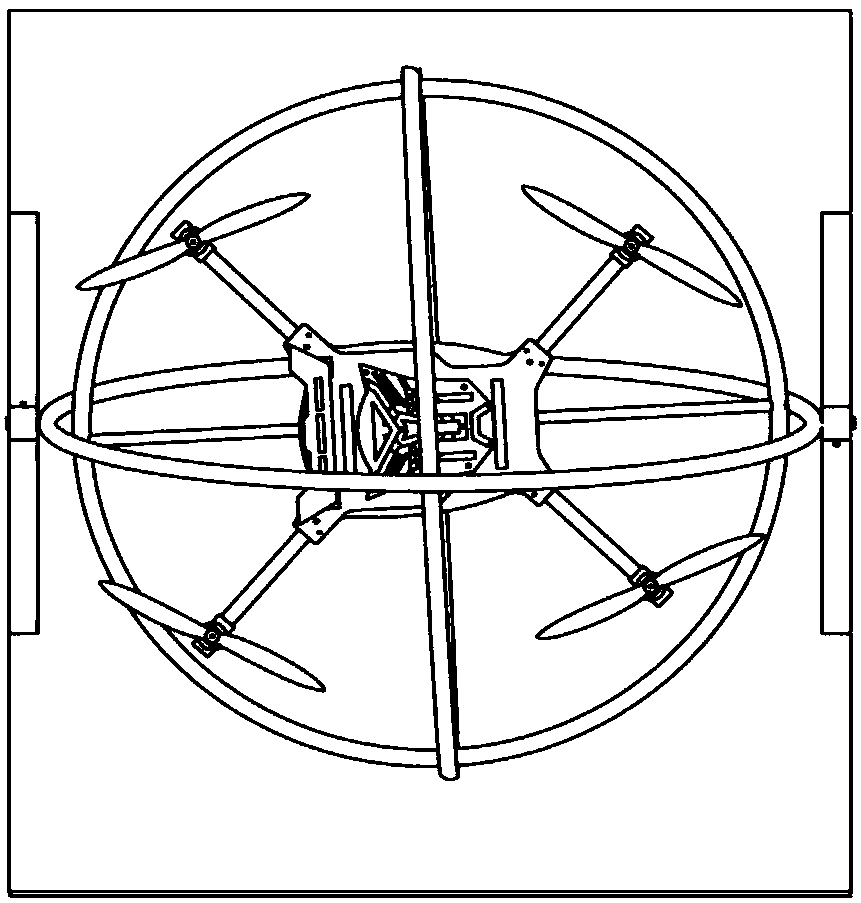
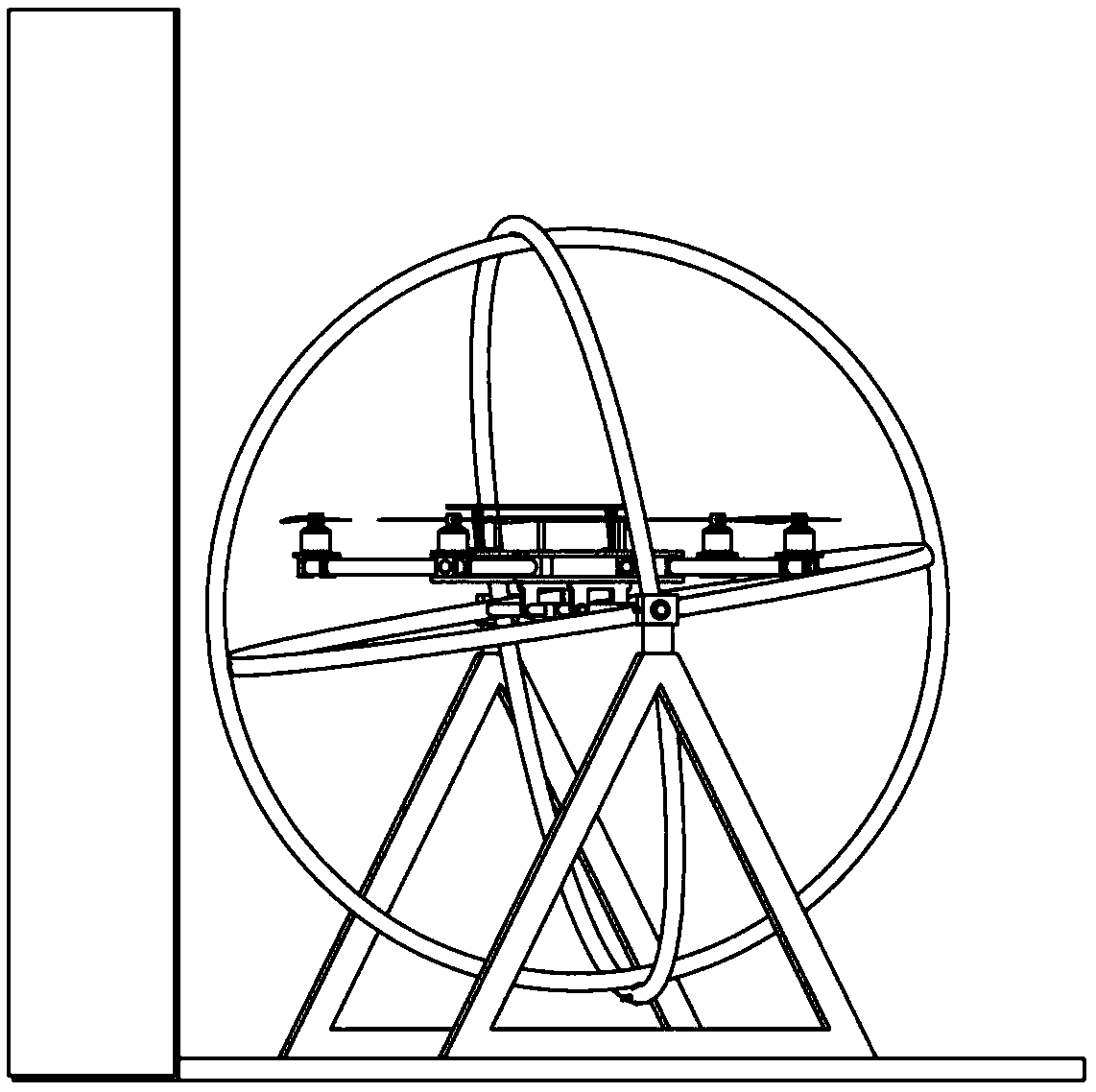
[0044] A multi-model unmanned aerial vehicle debugging platform, including a base plate 1, a support structure 2, an outer ring 4, a middle ring 5, an inner ring 6, a limit hole 7, a stop pin shaft 8, a fixer 9, a support shaft 10 and a mechanical sensor 11.
[0045] The support structure 2 is a triangular structure, and the bottom edges of the two support structures 2 are arranged in parallel on the base plate 1. The top of each support structure 2 is connected with the fixture 9 through a mechanical sensor 11, and the mechanical sensor 11 is used to collect data along the vertical direction. The tension of the anchor 9 on the support structure 2 in the direction.
[0046] Such as Figure 5 As shown, a multi-model debugging platform is composed of base 1, support structure 2, anti-shooting propeller acrylic board and other...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com