

Visual inertial range measurement method and equipment using online time calibration
A technology of time calibration and odometry, which is applied in image data processing, instruments, calculations, etc., and can solve problems such as moving speed errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention.
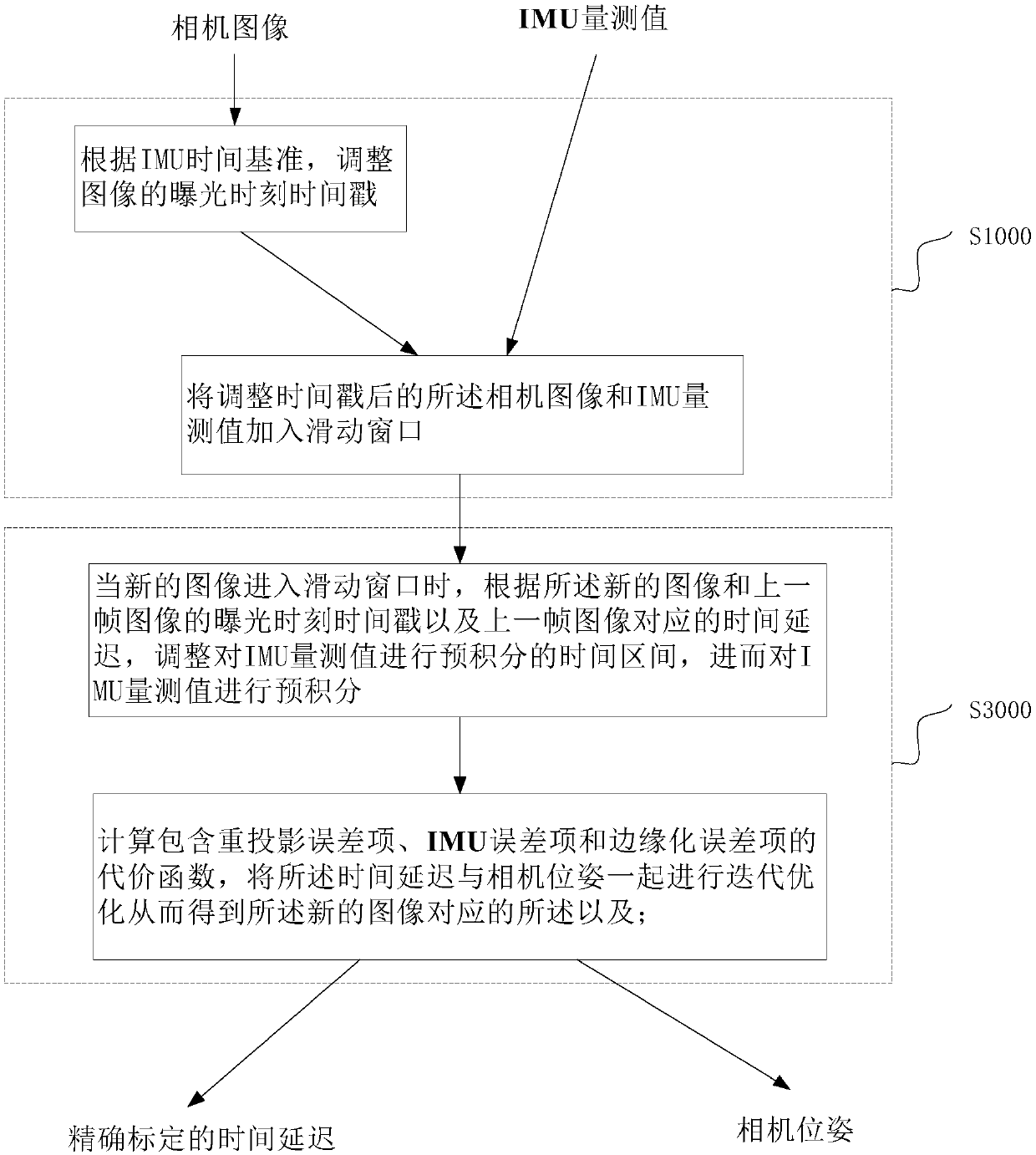
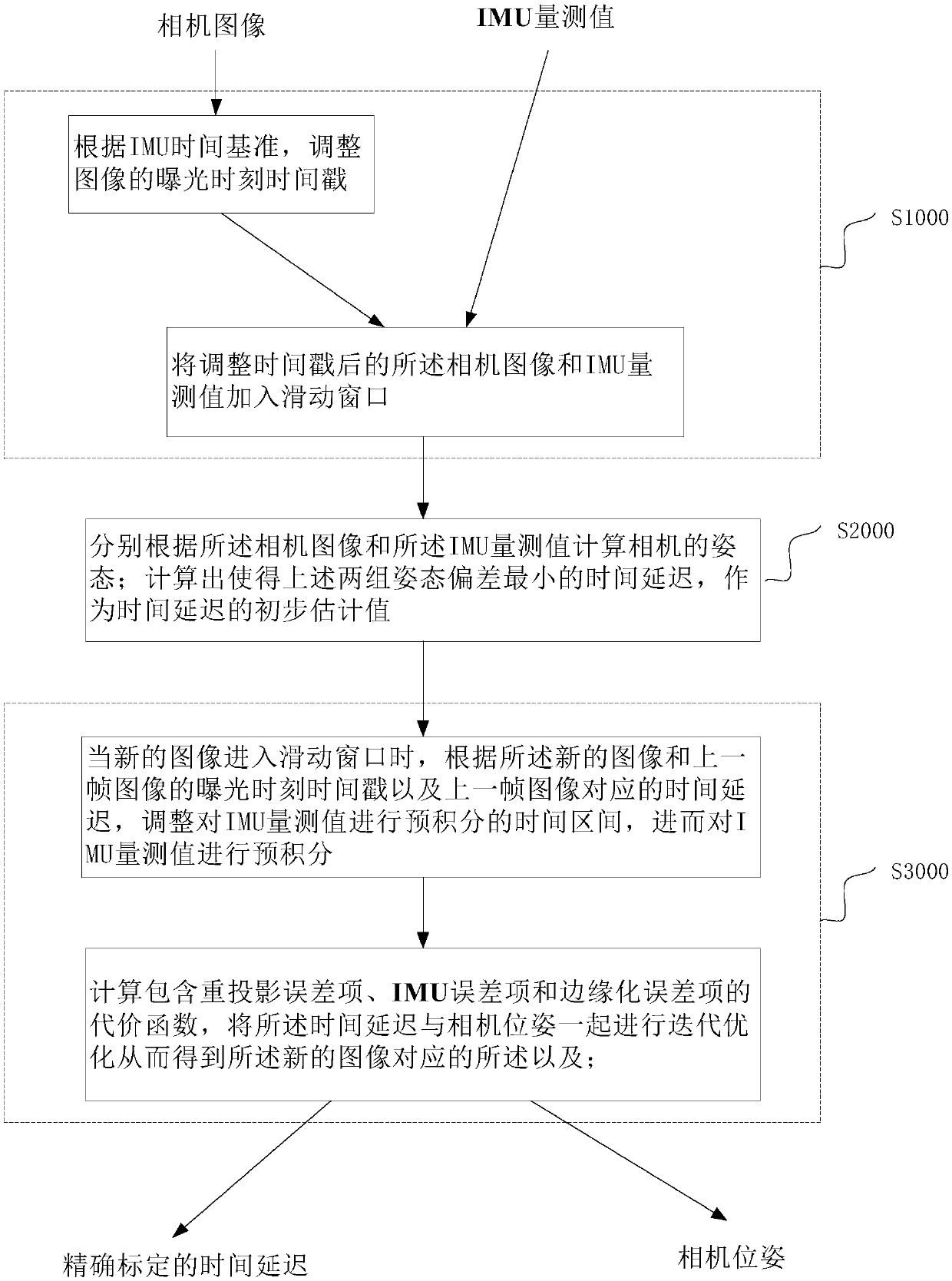
[0117] The invention proposes a visual inertial odometry method using online time calibration, and effectively improves the accuracy of camera tracking through online accurate calibration of the time delay of the camera and IMU system. The present invention is used to realize online calibration of time delay in VIO algorithms based on nonlinear optimization, such as VINS; these algorithms first use the IMU measurement value to perform pre-integration, and then in the local sliding window, the cost function is obtained by nonlinear optimization The real-time pose of the camera; the cost function includes a reprojection error term, an IMU error t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More