

Robot joint vibration analyzing and inhibiting method based on flexible dynamical model
A technology of robot joints and dynamic models, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems that cannot meet the requirements of robot control accuracy, and achieve the effect of simple analysis methods and avoiding instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
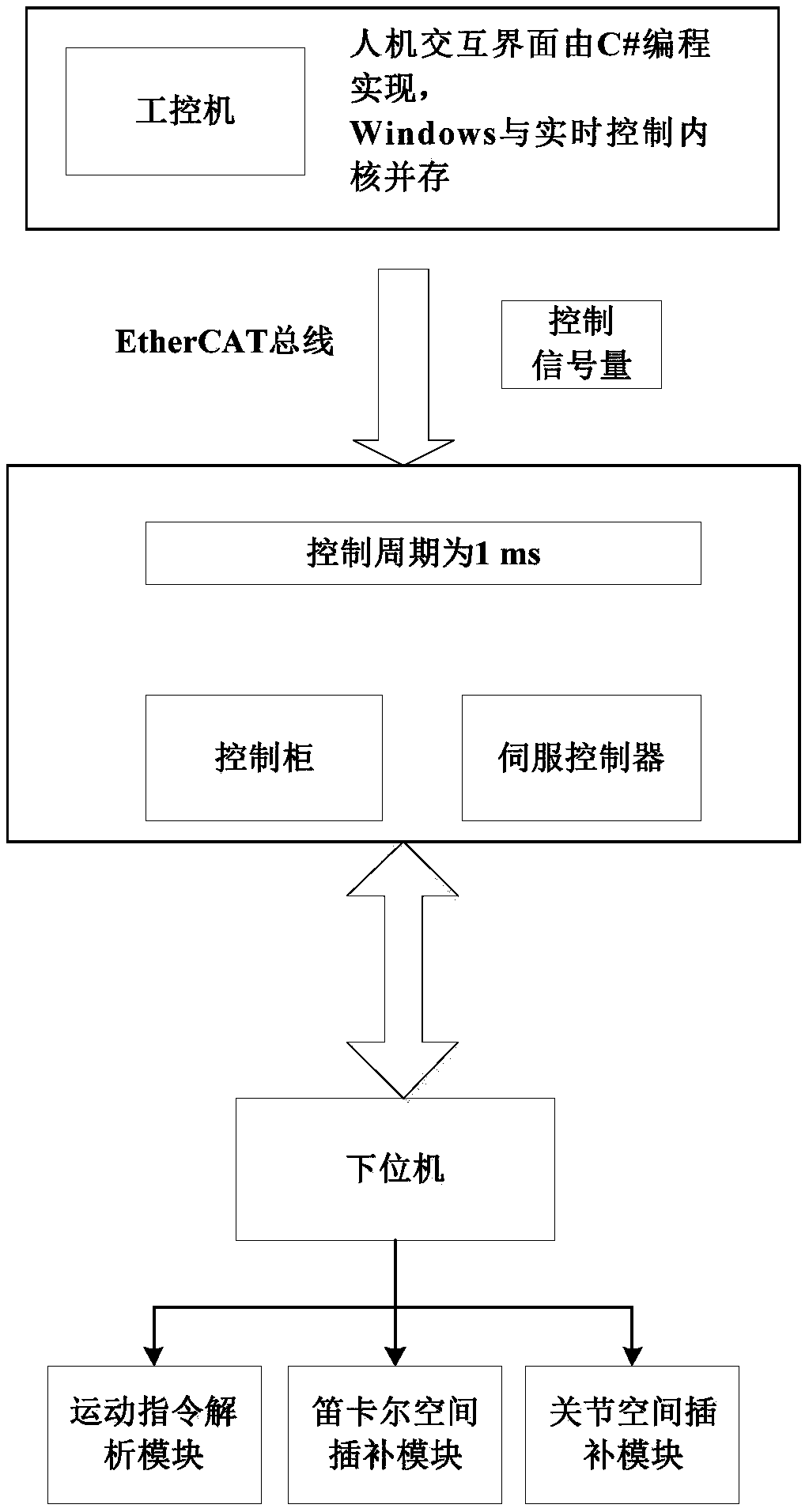
[0057] Analysis such as figure 1 The flexible factors in the servo system of the robot are shown. These flexible factors exist in the mechanical transmission parts of the joints, including transmission shafts, couplings, reducers, etc., which have certain elasticity, which makes the mechanical system itself vibrate.
[0058] A robot joint vibration analysis and suppression method based on a flexible body dynamics model, including steps:
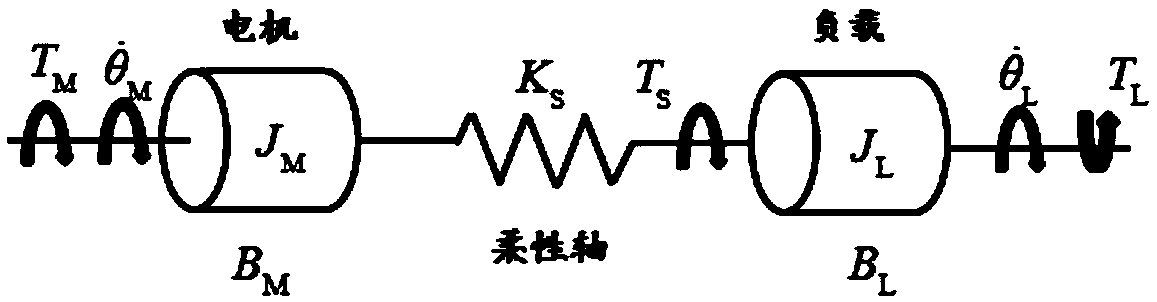
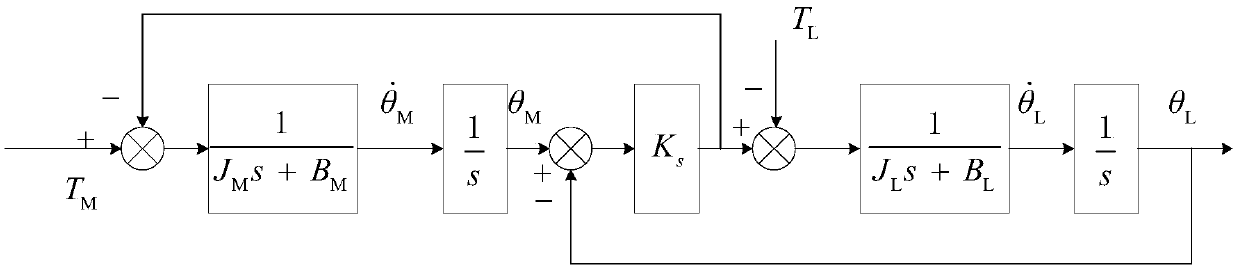
[0059] (1) set up the flexible body dynamics model of robot joint, analyze the reason that it produces vibration from the mathematical expression of described flexible body dynamics model;
[0060] (2) Use ABAQUS finite element software to obtain the vibration mode information of the joint, and obtain the measuring point arrangement of the hammer excitation experiment method based on the vibration mode information of ABAQUS, and obtain the modal information of the robot joint through the experiment, and the modal information includes resonanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More