

All-terrain moving detecting robot
A robot, all-terrain technology, applied in the field of robots, can solve problems such as lifting or lowering, and achieve the effect of stable performance and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
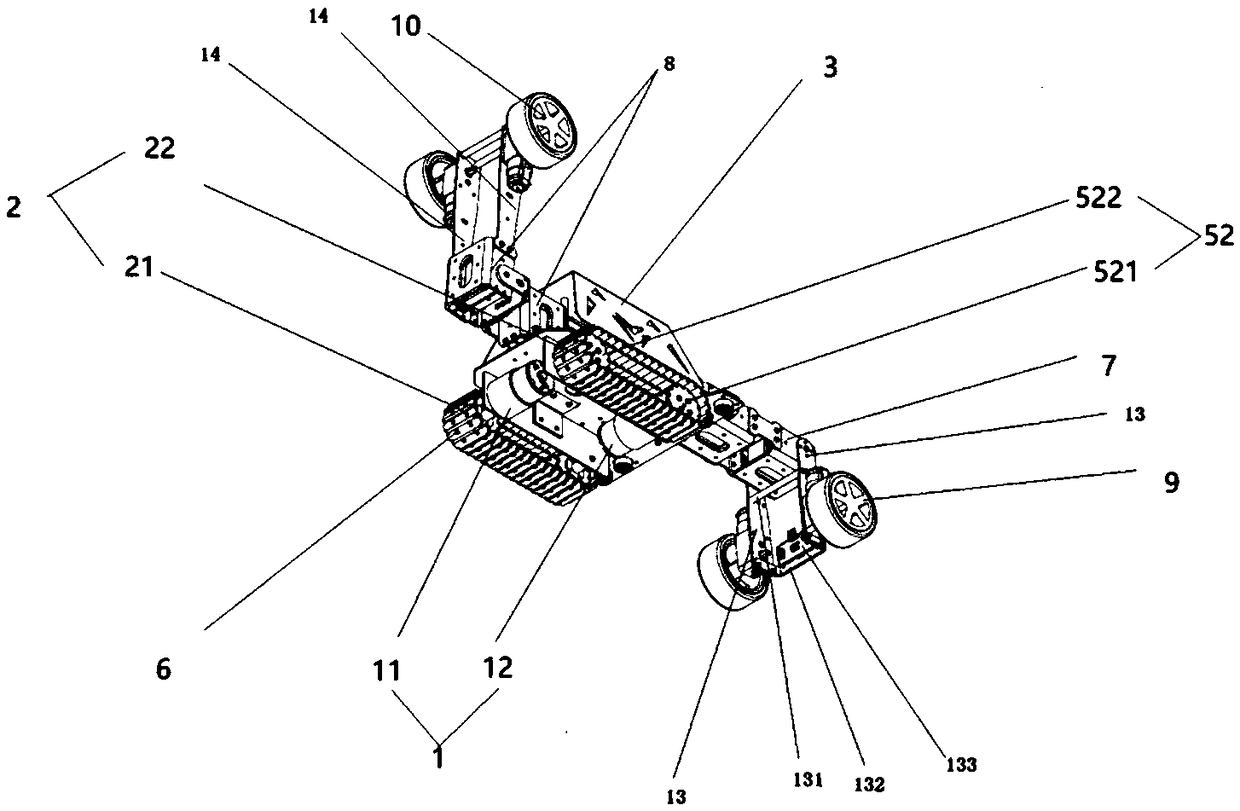
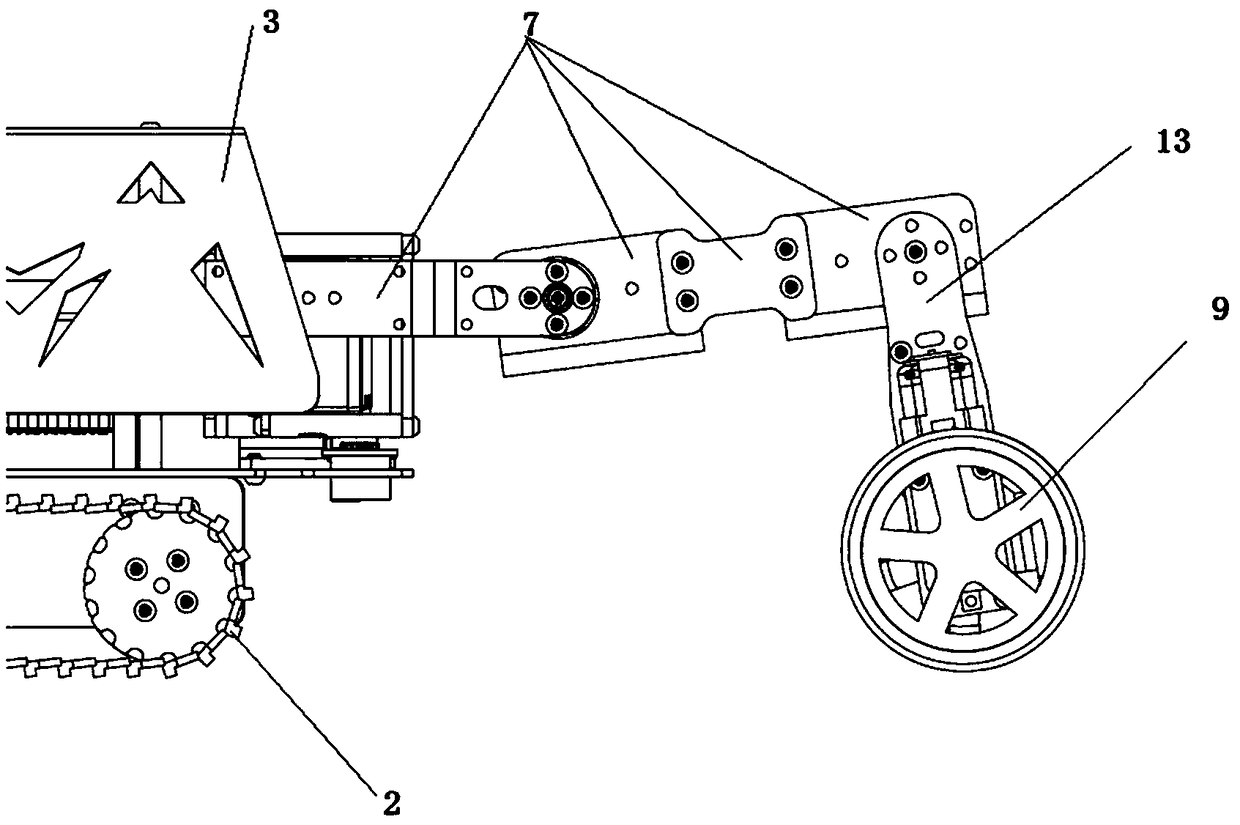
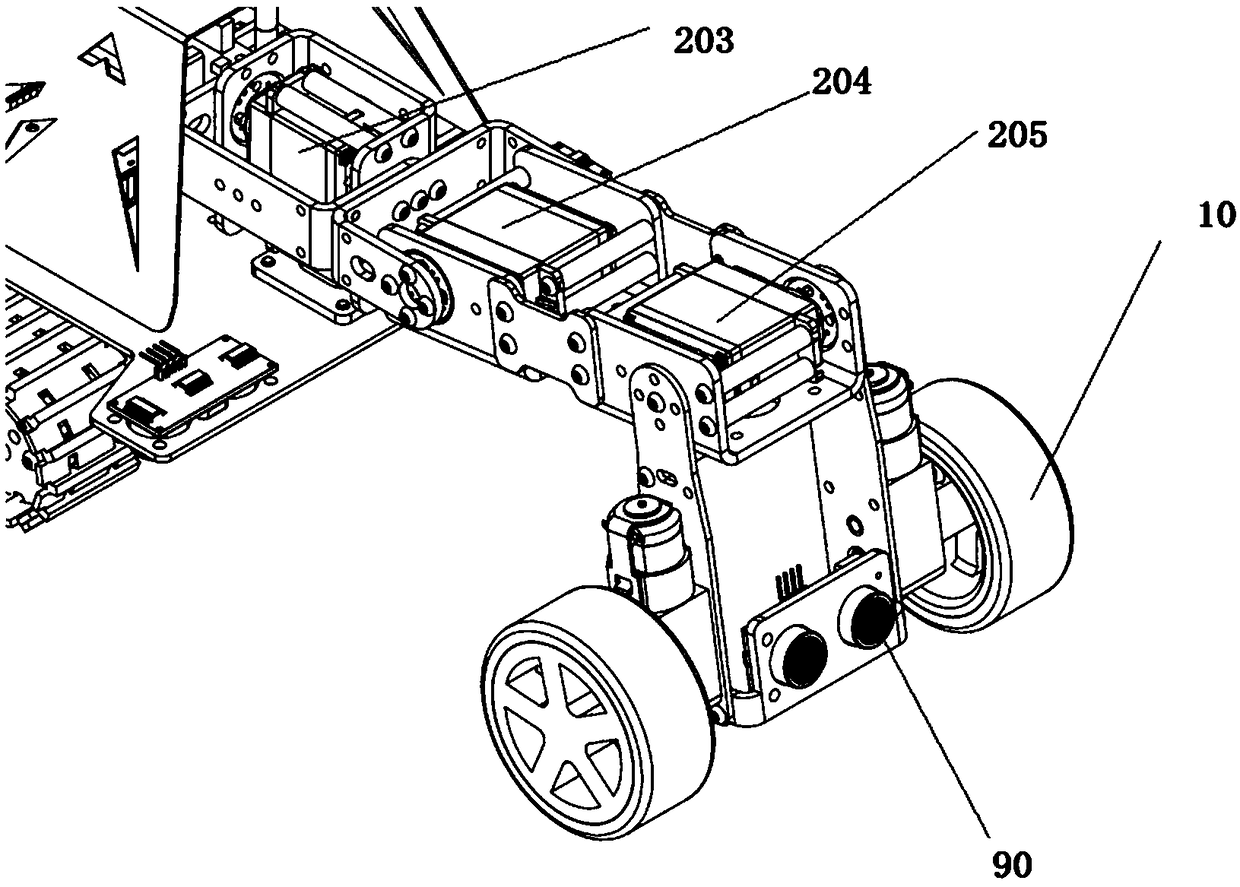
[0039] Such as Figure 1 to Figure 7 The all-terrain mobile detection robot shown in , uses a wheeled structure to walk on flat roads, and uses a crawler structure to walk on complex roads. It includes wheeled components, car body 3, chassis system, steering gear system, and controller , an environment detection system, a power supply system and a drive motor, the vehicle body is located above the chassis system.
[0040] The drive motors include wheel drive motors and crawler chassis drive motors.
[0041] The chassis system is located below the car body, and the chassis system adopts a crawler chassis as a crawler component of the robot. The chassis system includes a crawler belt 2, a synchronous pulley, a chassis support frame and a crawler chassis drive motor 1 .
[0042] Preferably, the crawler chassis driving motor 1 includes a first crawler c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More