

Agile maneuvering and fast stable control method of three-super platform
A stable control method and agile maneuvering technology, which can be applied to motor vehicles, attitude control, space navigation equipment, etc., and can solve the problems of difficult to achieve agile maneuvering and fast stable control of loads, and long stabilization time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
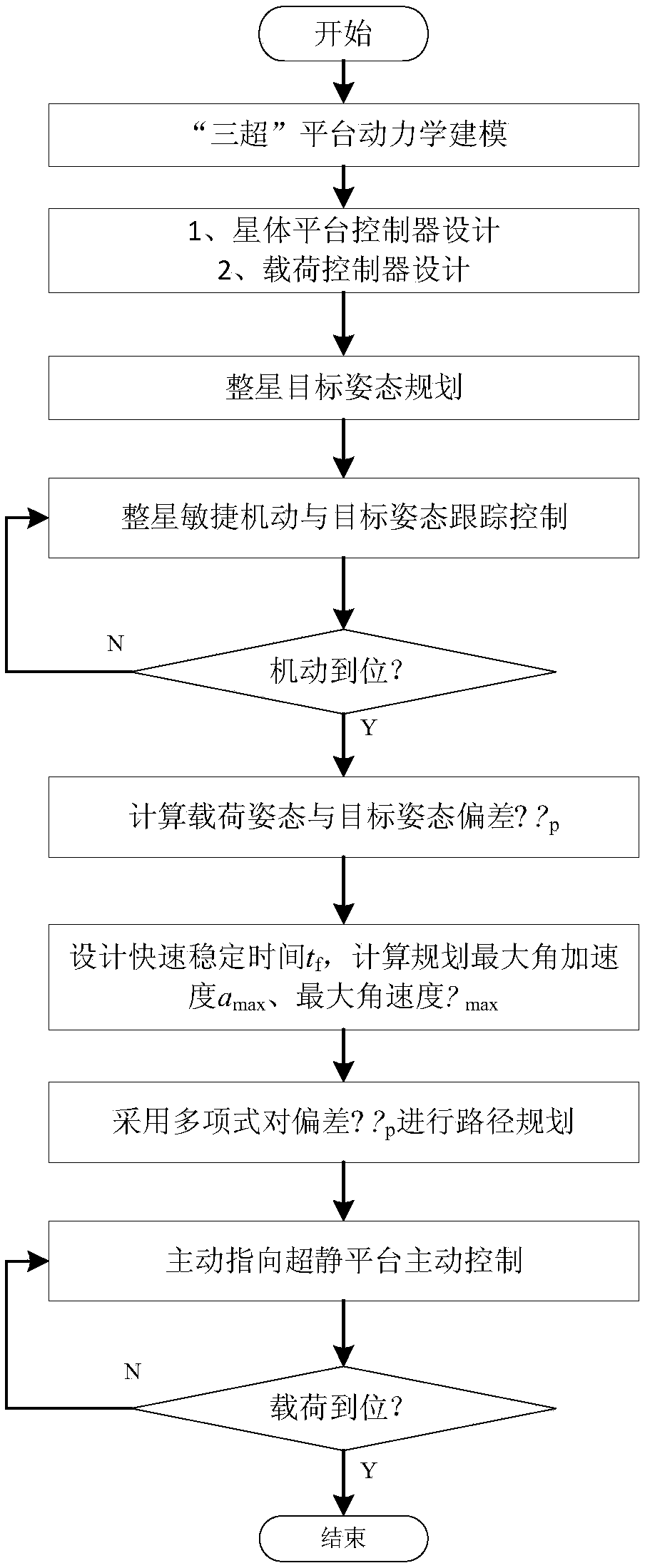
[0092] The present invention adopts figure 1 The flow shown completes the agile maneuvering and fast and stable control of the three-super platform. The specific method is as follows:
[0093](1) The three-super platform includes a star, a load, a sensor, and an actuator; the actuator includes: a control moment gyroscope group, and an active pointing super-static platform actuator; the sensor includes: a gyroscope installed on the star , the star sensor installed on the load, the micrometric sensor installed on the load, the eddy current of the active pointing ultra-static platform actuator installed on the load; the star is used to support the active pointing ultra-static platform and the load; the active pointing ultra-static platform is installed Between the payload and the star, it consists of six actuators.
[0094] (2) Establish the displacement constraint model of active pointing ultra-static platform as follows:
[0095] L p =J p x p +J b x b
[0096] In the fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More