

Method and system of combining three-dimensional line-of-sight tracking and brain-computer interface to control manipulator to grasp object
A line-of-sight tracking and brain-computer interface technology, applied in the field of human-computer interaction, can solve problems such as unintuitiveness, low intention recognition rate, false triggering of robot arms, etc., and achieve the effect of convenient interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
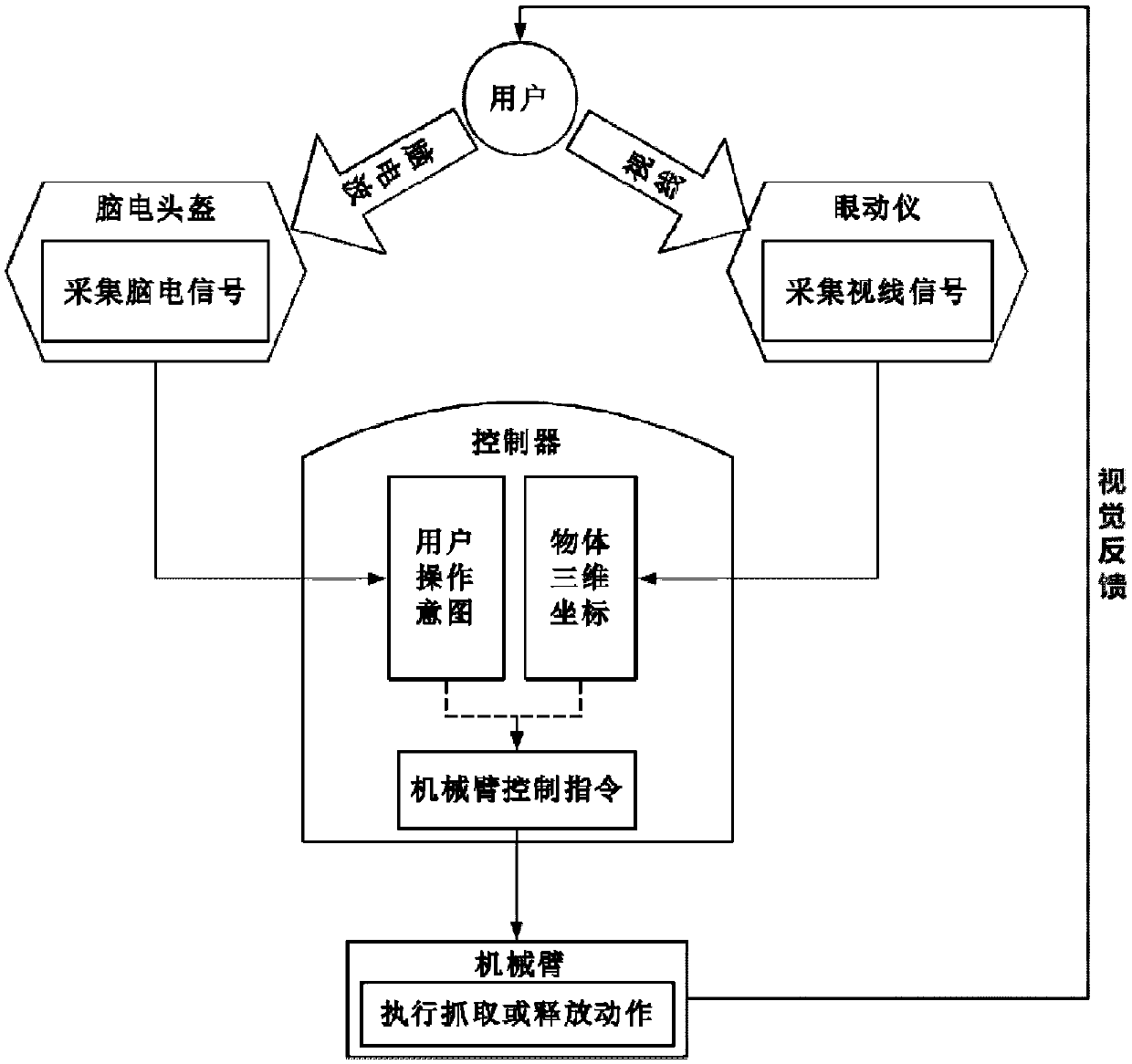
[0038] refer to figure 1 , the present invention proposes a system that combines three-dimensional line-of-sight tracking and brain-computer interface technology to control the robotic arm to grab objects. The system includes an EEG helmet, an eye tracker, a controller, and a robotic arm. dynamic instrument. In one embodiment, the EEG helmet adopts Emotive EPOC+ from Emotiv Systems. The EEG helmet contains 14 nerve signal recording electrodes, which are used to collect changes in human brain EEG signals. The sampling frequency is 128HZ, and the collected signals are sent to the controller through Bluetooth. The eye tracker uses Tobii's Eye Tracker 4C, which communicates with the controller through the USB3.0 interface, and the communication rate is 60Hz. The eye tracker is used to collect the position of the pupil relative to the eye tracke...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More