

Coverage path planning method, device, equipment, computer device and storage medium
A coverage path and coverage direction technology, applied in the field of coverage path planning based on coarse positioning, can solve the problem that equipment cannot realize coverage operation economically and efficiently, and achieve the effects of low requirements, improved efficiency, and reduced cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
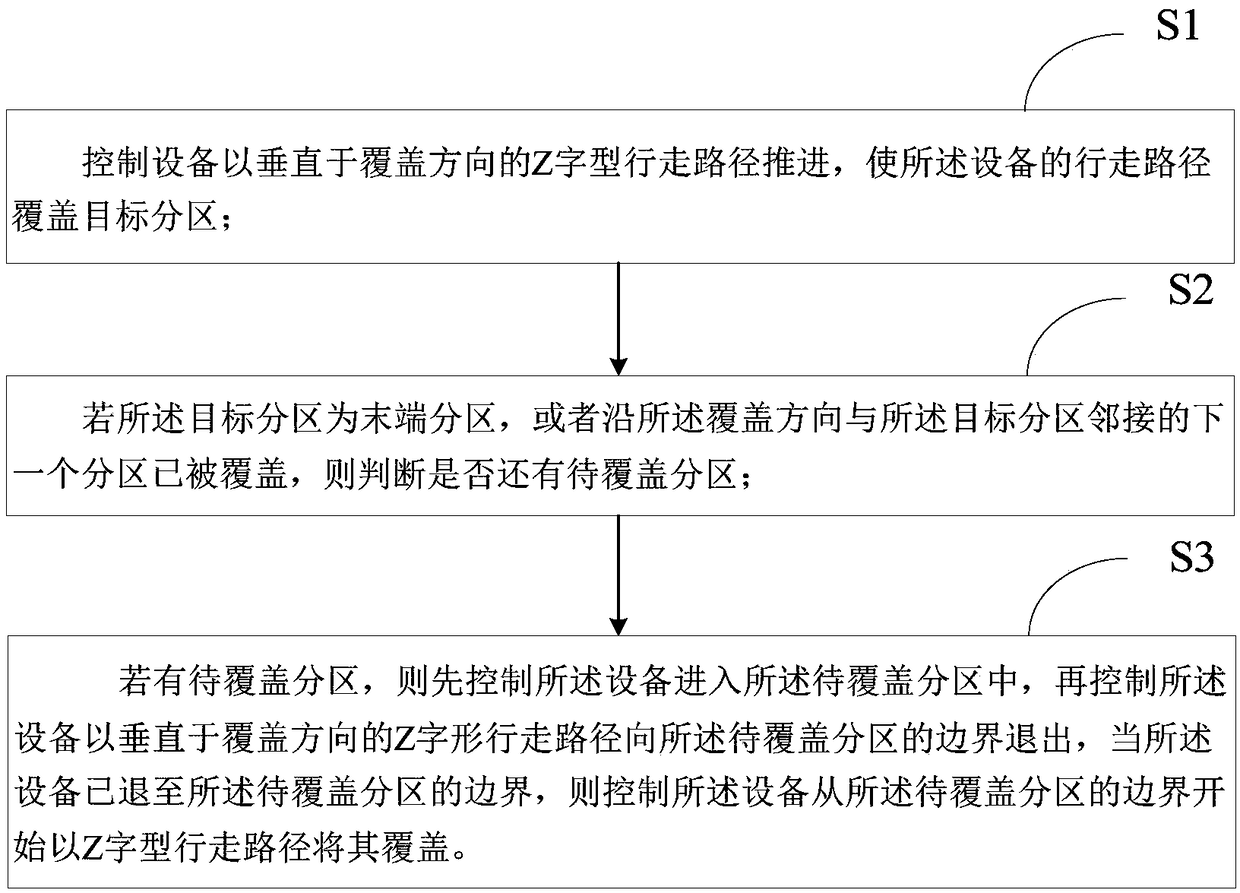
[0032] figure 2 It shows a flow chart of a coverage path planning method provided by an embodiment of the present invention, which is applied to a work area partitioned by a cow-plow decomposition method, and the method includes the following steps:
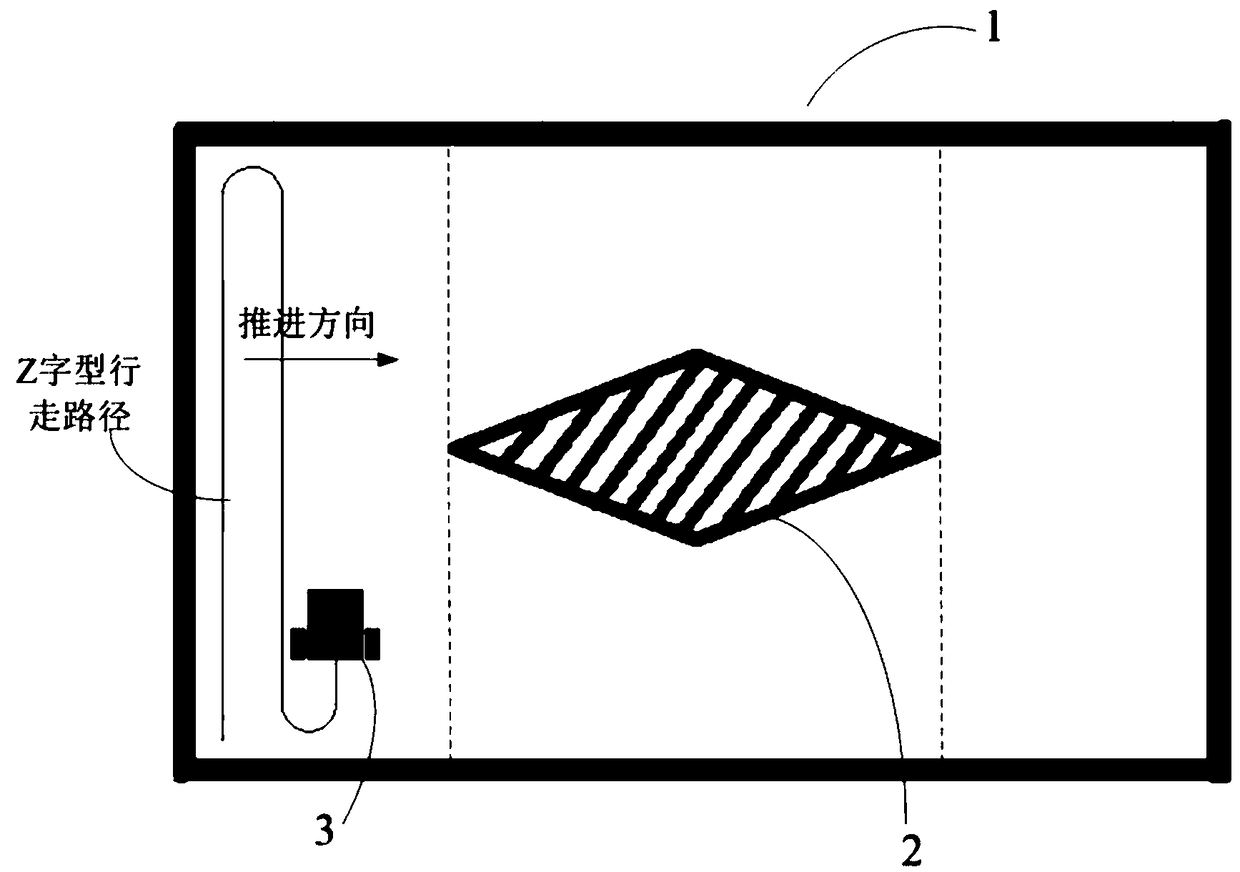
[0033] Step S1, controlling the device to advance in a Z-shaped walking path perpendicular to the coverage direction, so that the walking path of the device covers the target partition;
[0034] Step S2, if the target partition is an end partition, or the next partition adjacent to the target partition along the coverage direction has been covered, then determine whether there is still a partition to be covered;
[0035] Step S3, if there is a partition to be covered, first control the device to enter the partition to be covered, and then control the device to exit toward the boundary of the partition to be covered in a Z-shaped walking path perpendicular to the coverage direction, when the If the device has retreated to the bo...
Embodiment 2
[0075] Figure 9 It shows a flow chart of a coverage path planning device provided by an embodiment of the present invention, which is applied to a work area partitioned by cattle-plowing decomposition method, and the device includes the following units:
[0076] The propulsion unit 100 is configured to control the device to advance in a zigzag walking path perpendicular to the coverage direction, so that the walking path of the device covers the target partition;
[0077] The partition to be covered judging unit 200 is configured to judge whether there is a partition to be covered if the target partition is an end partition, or the next partition adjacent to the target partition along the coverage direction has been covered;
[0078] The area to be covered coverage unit 300 is configured to firstly control the device to enter the area to be covered if there is an area to be covered, and then control the device to move toward the area to be covered in a Z-shaped walking path p...
Embodiment 3
[0115] An embodiment of the present invention provides a device, the device is a mobile device, and the mobile device includes the apparatus for planning a coverage path based on coarse positioning as provided in any one of the above second embodiments.
[0116] As a specific embodiment of the present invention, the mobile device is a mowing robot.
[0117] The mobile device in the above-mentioned embodiment of the invention is implemented in the following way: the control device performs coverage work. When the device is in the end partition, or when the next adjacent partition along the coverage direction has been covered, if there is still a partition to be covered, the control device enters first. In the area to be covered, the control device exits the area to be covered to find the boundary, and finally starts to cover it from the boundary of the area to be covered; the method provided by the present invention realizes coverage path planning based on rough positioning, bec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More