

Three-dimensional reconstruction method, system and device based on aerial photography of unmanned aerial vehicles
A three-dimensional reconstruction and UAV technology, applied in the field of three-dimensional reconstruction based on UAV aerial photography, can solve the problems of labor-intensive, time-consuming, and large amount of calculation of the three-dimensional model, and achieve the effect of easy operation and simple implementation process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
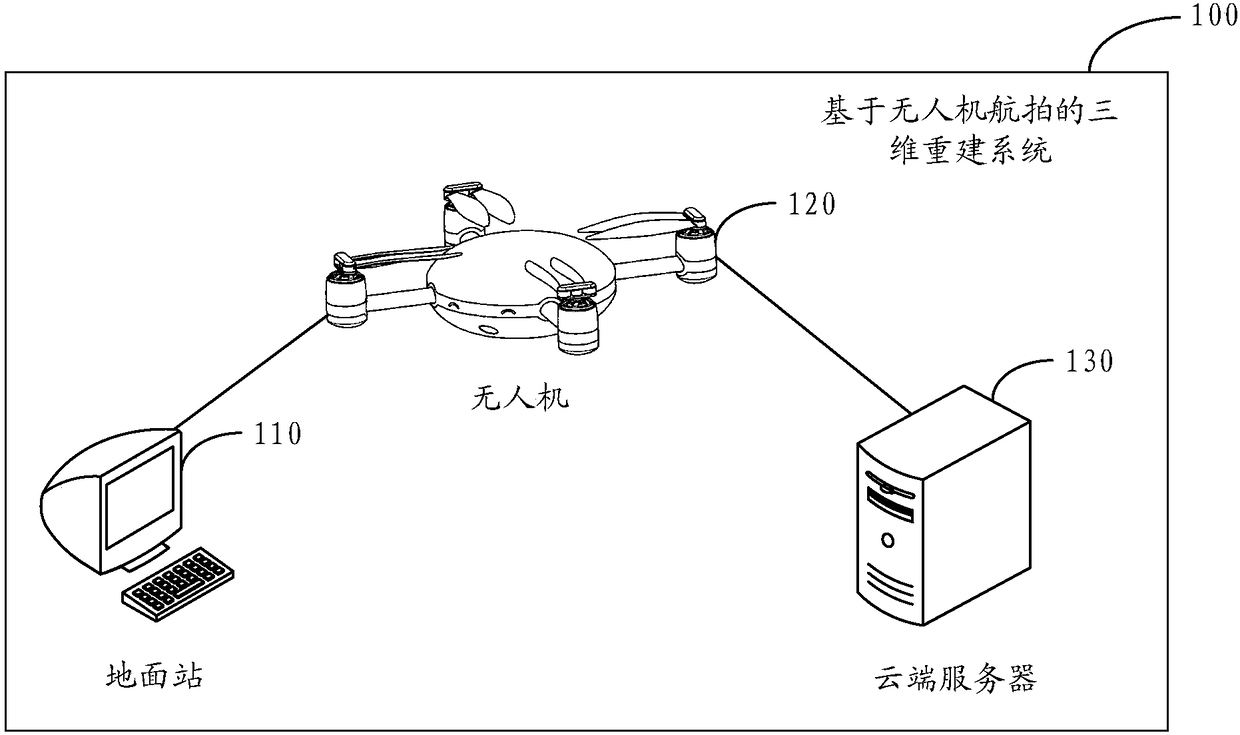
[0058] See figure 1 , is a schematic diagram of the 3D reconstruction system based on UAV aerial photography of the present invention.
[0059] exist figure 1 The illustrated system 100 includes a ground station 110, an unmanned aerial vehicle 120, and a cloud server 130. The ground station 110 is only a computer as an example. In practical applications, the ground station 110 can be smart devices such as smart phones and PADs. , the present invention is not limited to this; the UAV 120 is mounted with a shooting device ( figure 1 not shown in ), such as a camera; in addition, those skilled in the art can understand that the cloud server 130 actually refers to multiple physical servers, and among the multiple physical servers, one of them can be used as the main server, responsible for resource For deployment, the cloud server 130 has the characteristics of highly distributed and highly virtualized.
[0060] Specifically, the ground station 110 is configured to determine, b...
Embodiment 2
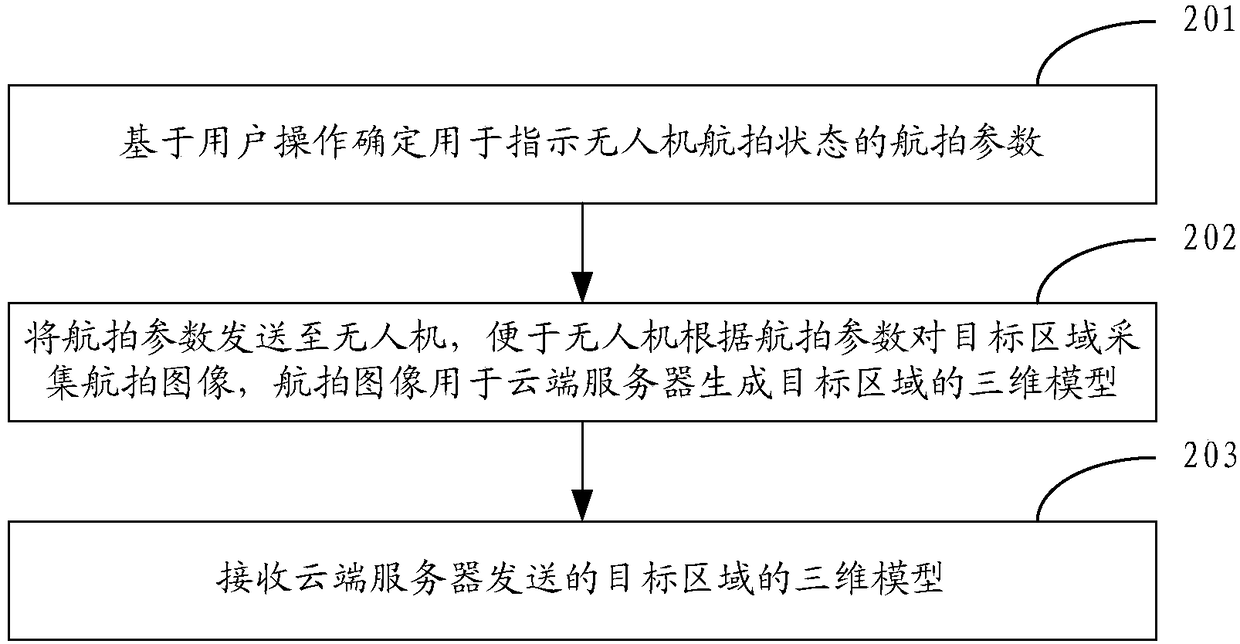
[0067] See figure 2 , is a flow chart of an embodiment of the 3D reconstruction method based on UAV aerial photography of the present invention, which is described above figure 1 Based on the example system shown, applied to figure 1 On the ground station 110 shown in the example, the following steps may be included:
[0068] Step 201: Determine aerial photography parameters for indicating the aerial photography status of the drone based on user operations.
[0069] In one embodiment, the ground station can display the satellite map to the user through the display interface, and the user can operate on the satellite map on the display interface. The surveyed area is referred to as the target area in the embodiment of the present invention for the convenience of description.
[0070] It should be noted that the manually framed area by the user may be of regular shape or irregular shape, which is not limited in the present invention.
[0071] In an embodiment, the user may ...
Embodiment 3
[0099] See Figure 4 , is a flow chart of another embodiment of the 3D reconstruction method based on UAV aerial photography of the present invention, which is described above figure 1 Based on the example system shown, applied to figure 1 On the unmanned aerial vehicle 120 shown in the example, the following steps can be included:
[0100] Step 401: Receive the aerial photography parameters sent by the ground station for indicating the aerial photography status of the UAV.
[0101] Same as the relevant description in the second embodiment above, the aerial photography parameters mentioned here may include at least one of the following: flight route, flight altitude, flight speed, shooting distance interval, and shooting time interval.
[0102] Step 402: Fly according to the aerial photography parameters and control the shooting equipment mounted on the drone to collect aerial photography images during the flight.
[0103] In the embodiment of the present invention, the UAV...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More