

Anchoring device for asteroid surface attachment based on multi-manipulator landing and fork ultrasonic drilling
An anchoring device and a technology of a robotic arm, applied in the field of asteroid surface attachment and anchoring, can solve problems such as the failure to achieve detector attachment and anchoring, and achieve the effects of increased attachment reliability, simple structure, and strong adhesion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
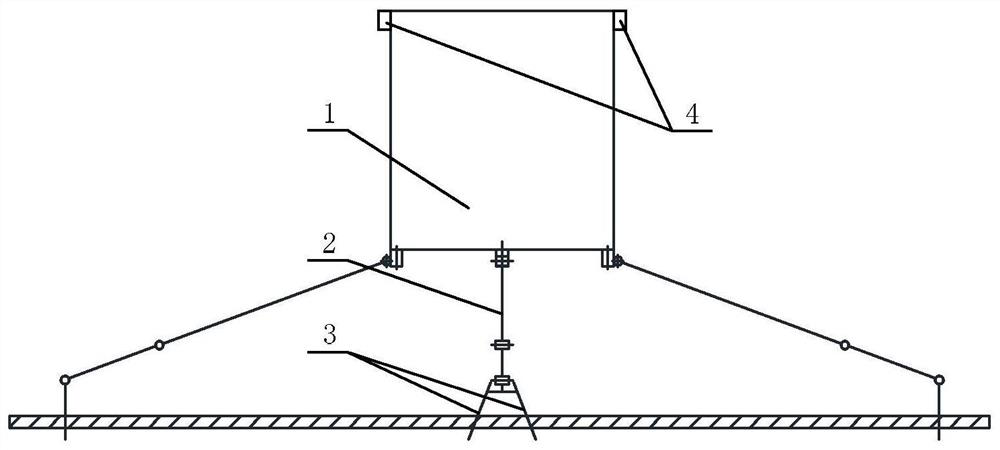
[0040] Such as figure 1 As shown, the asteroid probe in this embodiment includes a probe main body 1, a plurality of mechanical arms 2, an end effector 3 and a thrust engine 4; multiple thrust engines 4 are arranged on the probe main body 1, and the thrust engines 4 provide the probe with Attachment pressure. A plurality of mechanical arms 2 protrude from the side of the detector main body 1 , and each mechanical arm 2 has a pair of end effectors 3 . The two end effectors 3 are connected to the mechanical arm 2 at a certain angle to form a fork.
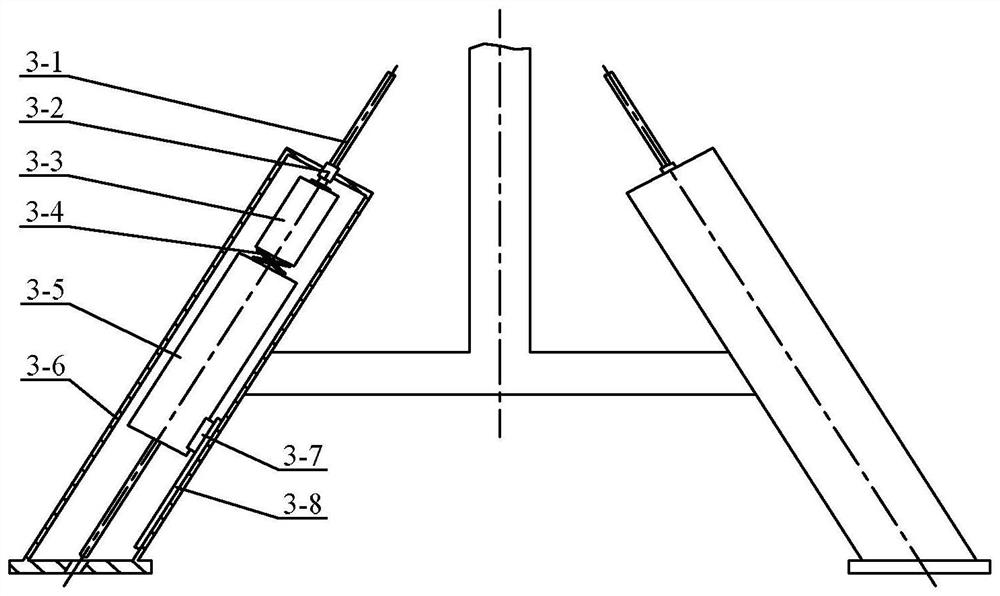
[0041] Such as figure 2 As shown, the end effector 3 structure of the present embodiment:
[0042] The screw nut 3-2 is fixed on the end effector housing 3-6, and the lead screw 3-1 is in a cantilever structure, which can be connected with the servo motor 3-3 through couplings and other components. When the servo motor 3-3 was working, the leading screw 3-1 made rotary linear motion. A disc spring 3-4 is connected between the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More