

Extreme learning machine based brushless direct current motor and position sensor less control method
An extreme learning machine, brushed DC motor technology, applied in the current controller, electronic commutator and other directions, can solve the problems of low precision, difficult to use motor operation requirements, etc., to achieve fast learning rate, good dynamic performance, improve The effect of reaction speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
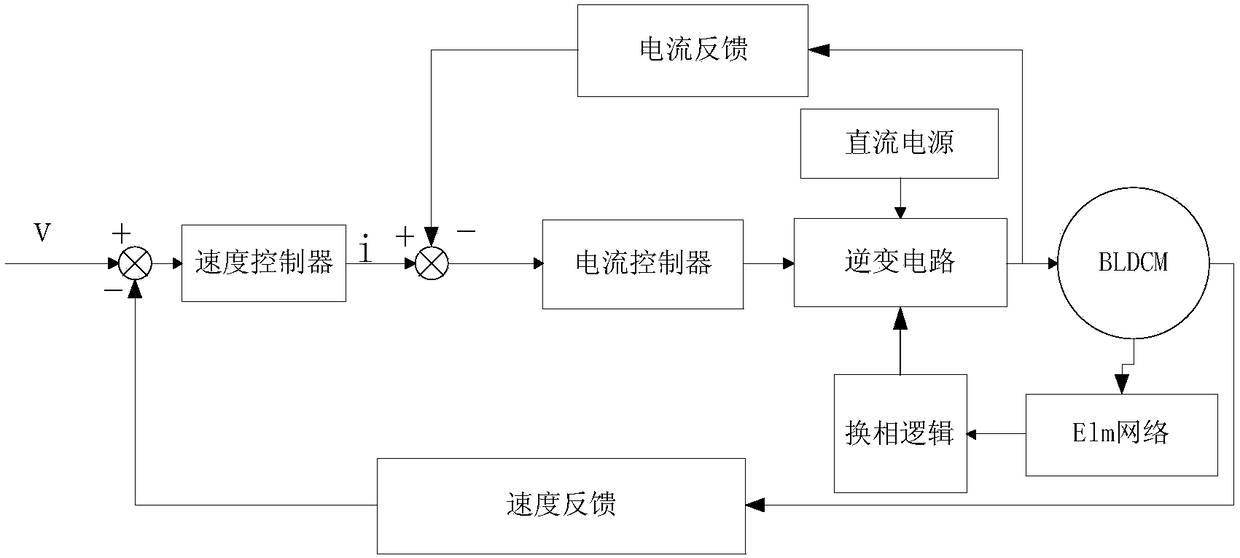
[0042] The brushless DC motor position sensorless control method based on the extreme learning machine proposed by the present invention is described in detail as follows in combination with the control system structure diagram:
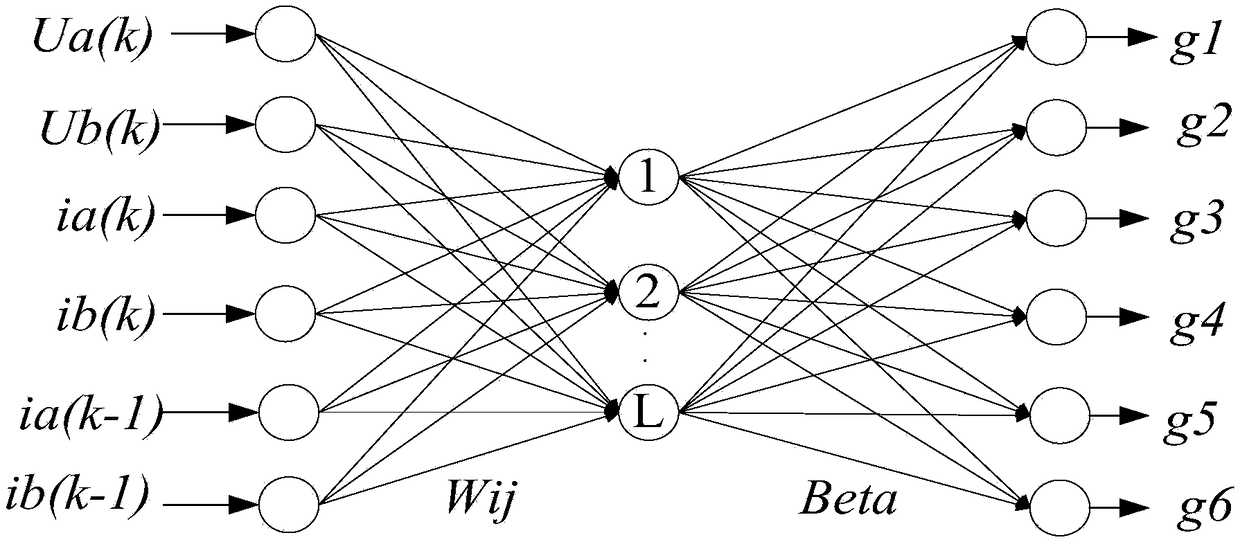
[0043] Phase 1: Network training phase, consisting of figure 1 It can be seen that the number of neurons in the input layer of the ELM network is 6, and the number of neurons in the output layer is 6. Its training steps are as follows:
[0044]The training data and test data are obtained by simulating the position sensor brushless DC motor through MATLAB, and the measured 5000 sets of training data and 2500 sets of test data are normalized;
[0045] Step2: Determine the number of neurons in the hidden layer, write a for loop program with the M file, embed the ELM program inside the loop, and initialize the number of hidden layer nodes, so that the number of hidden layer nodes increases continuously, and the number of hidden layers increases When th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More