

Hexapod robot central pattern inverse control method
A technology of a hexapod robot and a control method, which is applied in the field of reverse control of a central mode of a hexapod robot, can solve problems such as difficulty in satisfying the flexible motion of a bionic robot, and achieve the effect of reducing the complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] Such as figure 1 As shown, this embodiment provides a hexapod robot central mode reverse control method, which is characterized in that it includes the following steps:
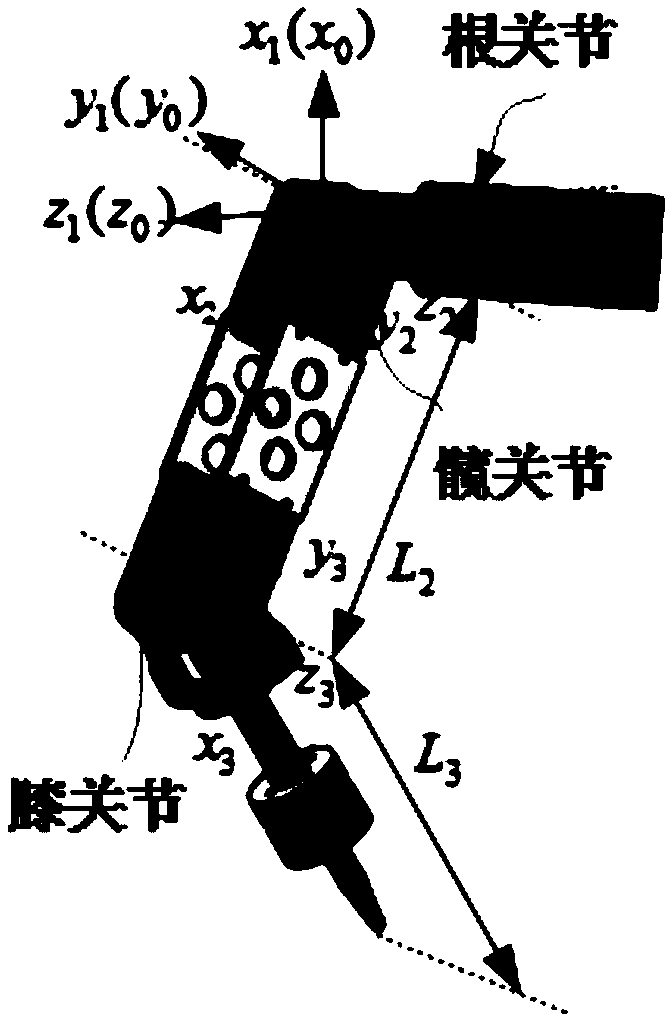
[0038] Step 1, establish the D-H model of the robot leg; in this embodiment, establishing the parameterized D-H model of the robot is the premise and basis for the study of robot kinematics.
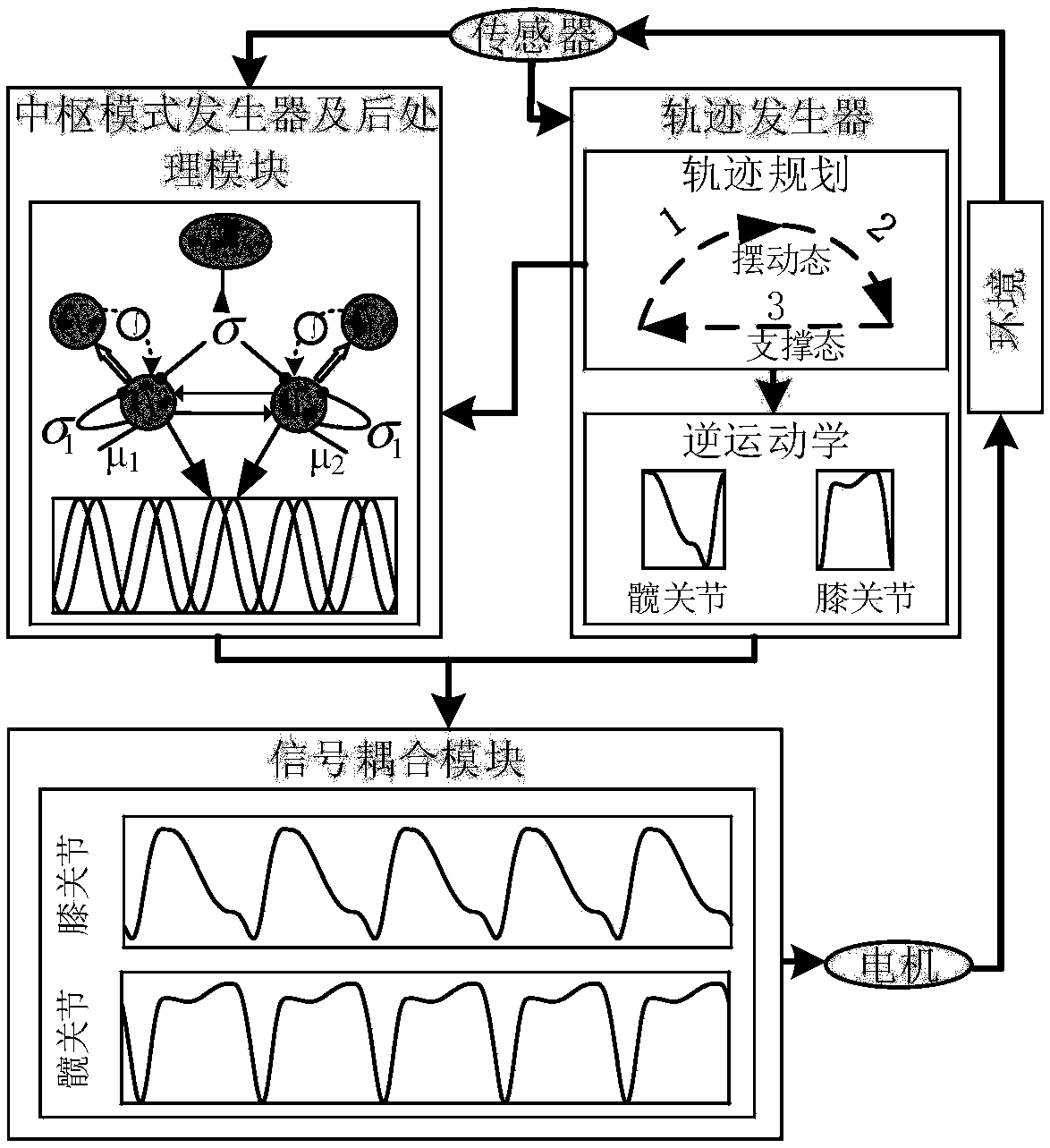
[0039] Step 2, outputting control signals through the central analog generator of the robot;
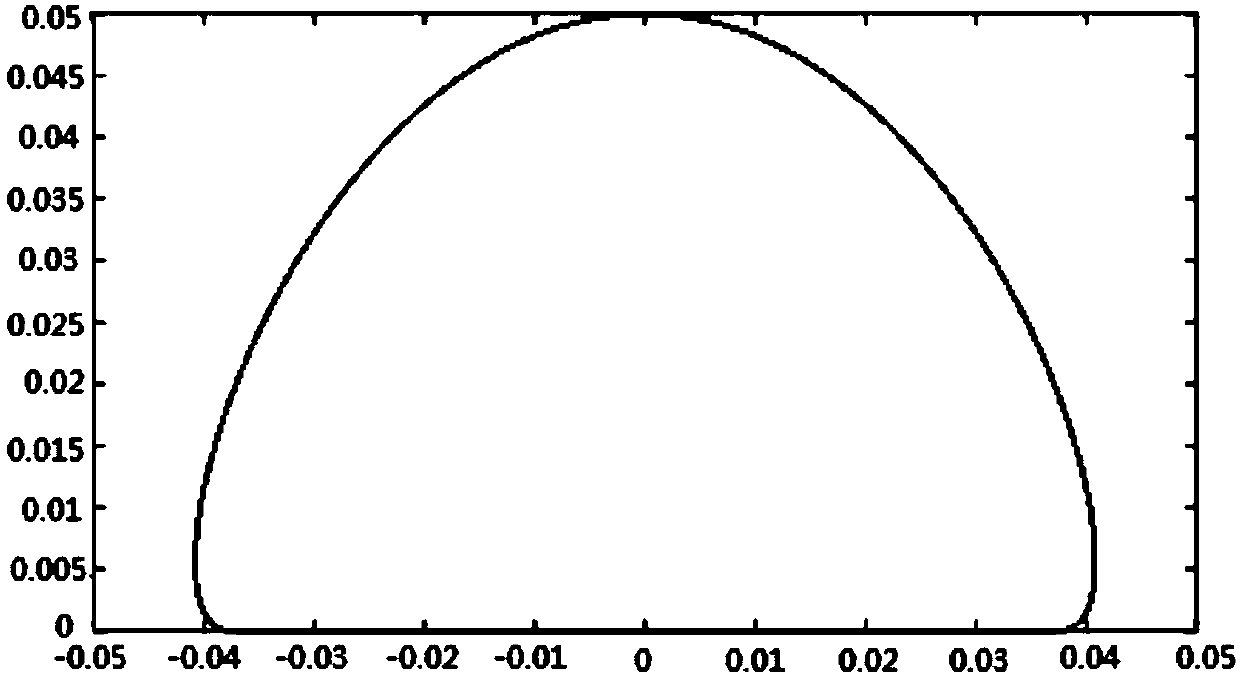
[0040] Step 3, plan the foot trajectory of the robot by outputting control signals;
[0041] Step 4: Carry out inverse kinematics analysis on the trajectory planning of the foot end, and obtain the joint rotation angle of each joint of the robot leg through formula (1);
[0042] include:
[0043]
[0044]
[0045]
[0046] In formula (1), θ 1 is the joint rotation angle of the root joint of the robot, is the joint rotation angle of the root joint of the i-th leg of the robot; θ 2 is the joint rotation an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More