

Automatic calibration method for line structured light visual system of arc welding robot
A vision system, line structured light technology, applied in instruments, manipulators, welding accessories, etc., can solve the problems of time-consuming and complex calibration process, achieve good practicability, improve flexibility and rapidity, and the calibration process is simple and convenient Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose, technical solution and advantages of the present invention clearer, the specific implementation process of the present invention will be further described in detail below with reference to the accompanying drawings.
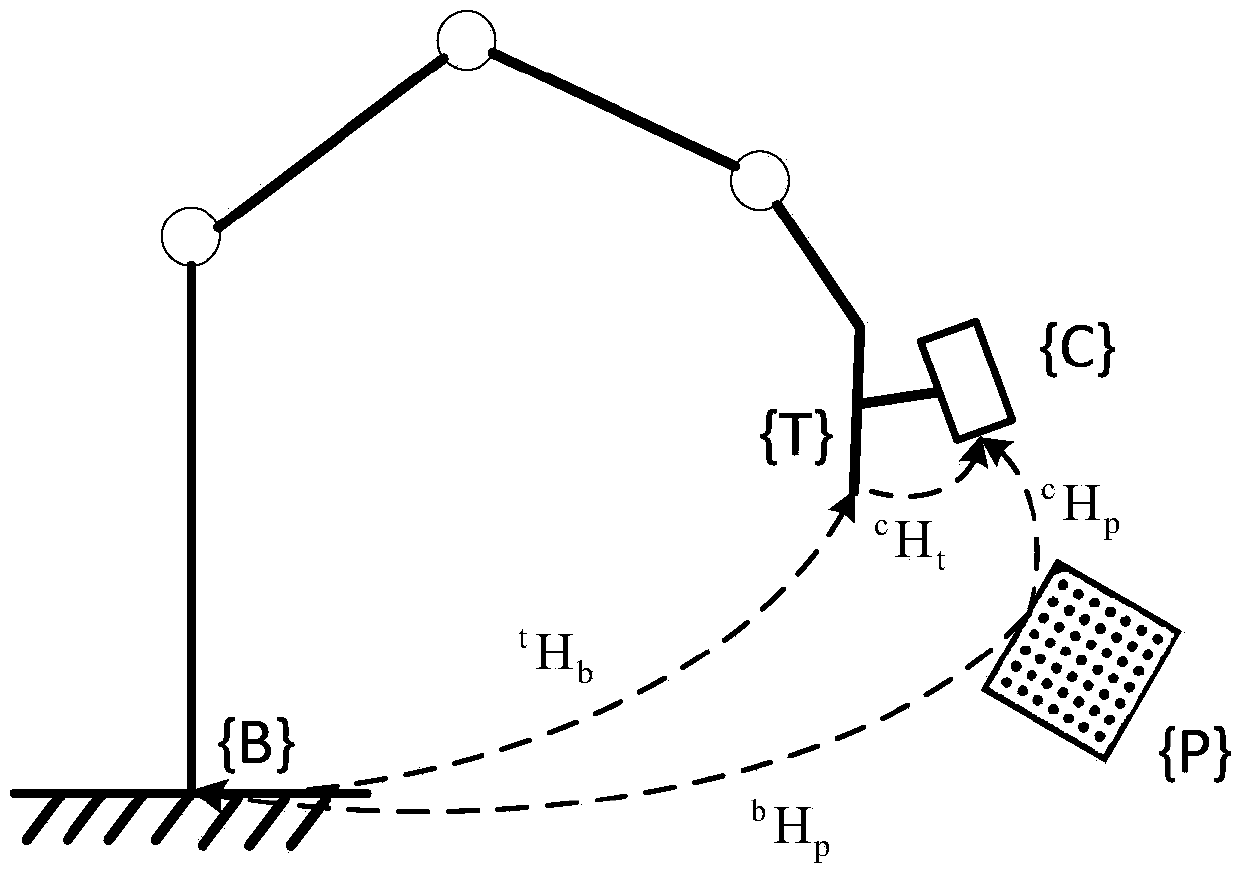
[0053] The calibration relationship of the coordinate system of the arc welding robot structured light vision system: figure 1 shown. The structured light vision sensor is fixed on the welding torch of the arc welding robot, and the calibration plate is located in the working space of the robot. {B} is the robot base coordinate system, {C} is the visual sensor coordinate system, that is, the camera coordinate system, {T} is the robot tool coordinate system, that is, the welding torch coordinate system, and {P} is the calibration plate coordinate system. According to the matrix transfer relationship, we can get
[0054] c h p = c h t t h b b h p
[0055] in, c h p is the transformation matrix from the calibration p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More