

Active and passive hybrid type subclavian vein puncture robot
A venipuncture and hybrid technology, applied in the field of medical devices, can solve the problems of doctor's hand-eye incoordination, affecting the success rate of puncture, failure of puncture operation, etc., achieving the effect of easy disassembly and disinfection, convenient operation by doctors, and reducing the occurrence of wrong puncture.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described below through the specific embodiments shown in the accompanying drawings. It should be understood, however, that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concepts of the present invention.
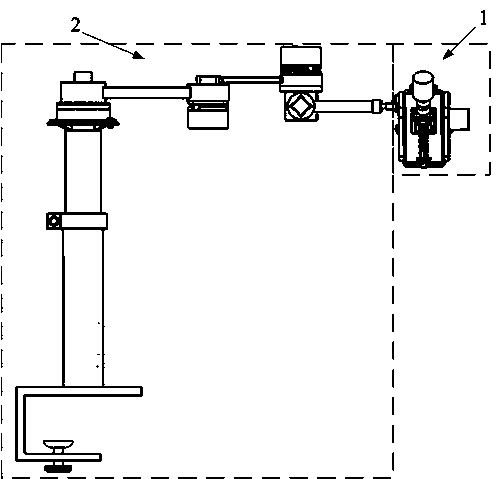
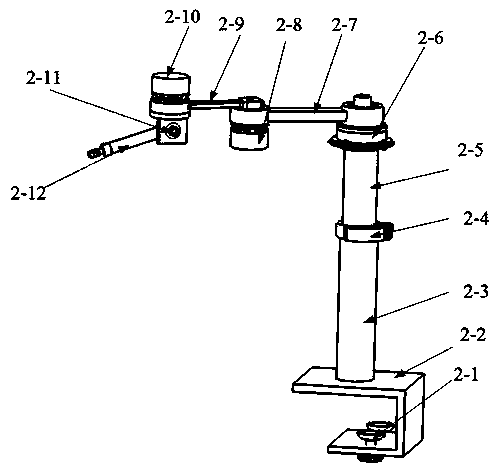
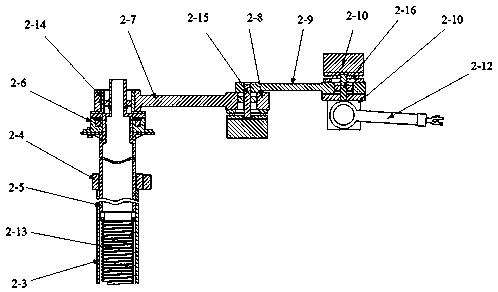
[0025] like figure 1 , 2, 3, 4, 5, the specific embodiment of the present invention adopts the following technical solutions: an active-passive hybrid subclavian vein puncture robot, which is composed of: a puncture angle adjustment module 1 and a posture adjustment module 2, the described The pose module connecting frame 1-15 of the puncture angle adjustment module 1 is clamped with the clamping clip 2-12-1 to realize the connection between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More