

Unmanned transplanter path planning method
A path planning and unmanned technology, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., can solve problems such as inability to use rice transplanters, pressure loss of seedlings, and unsuitable rice transplanters for rice transplanting operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
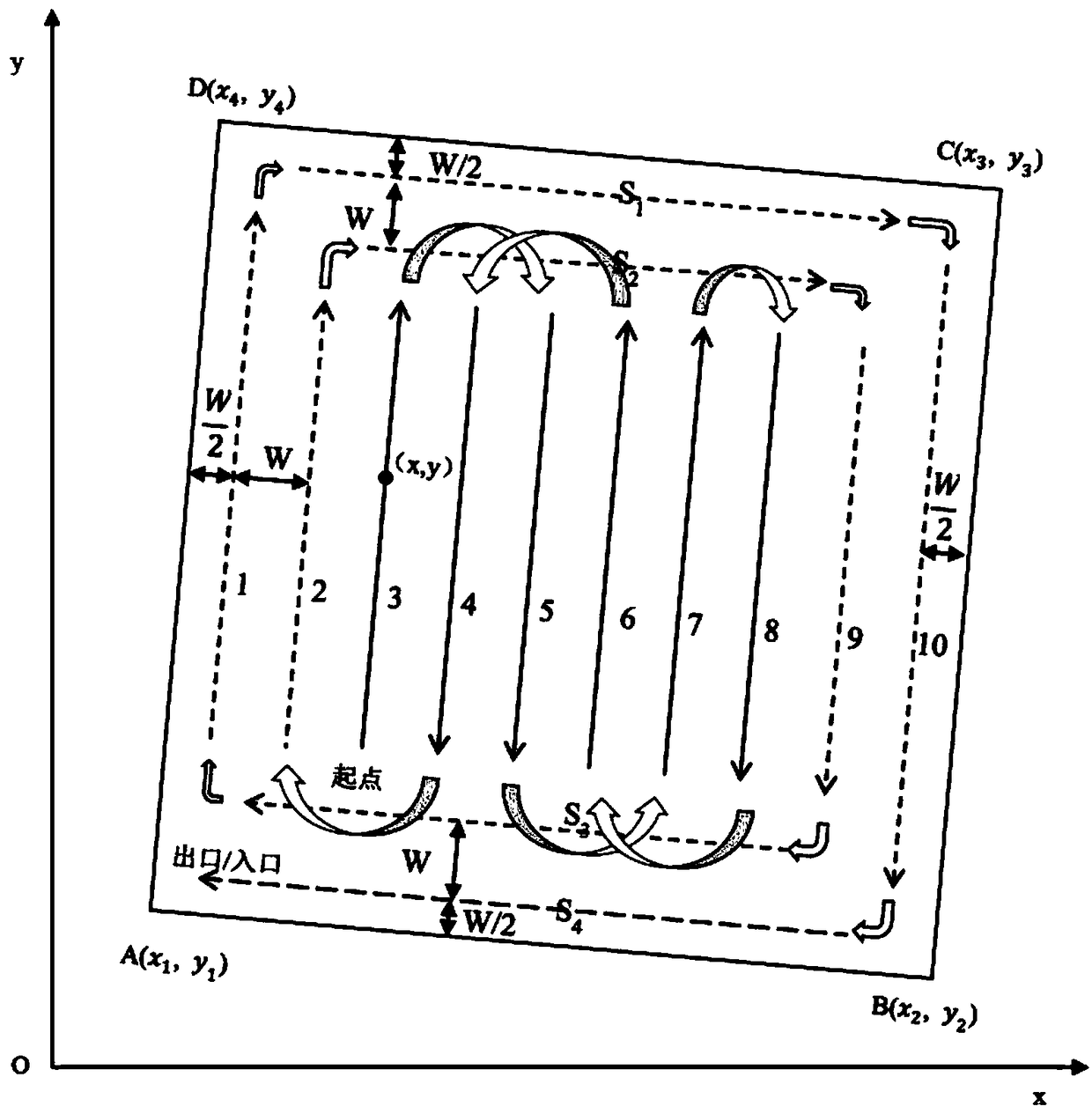
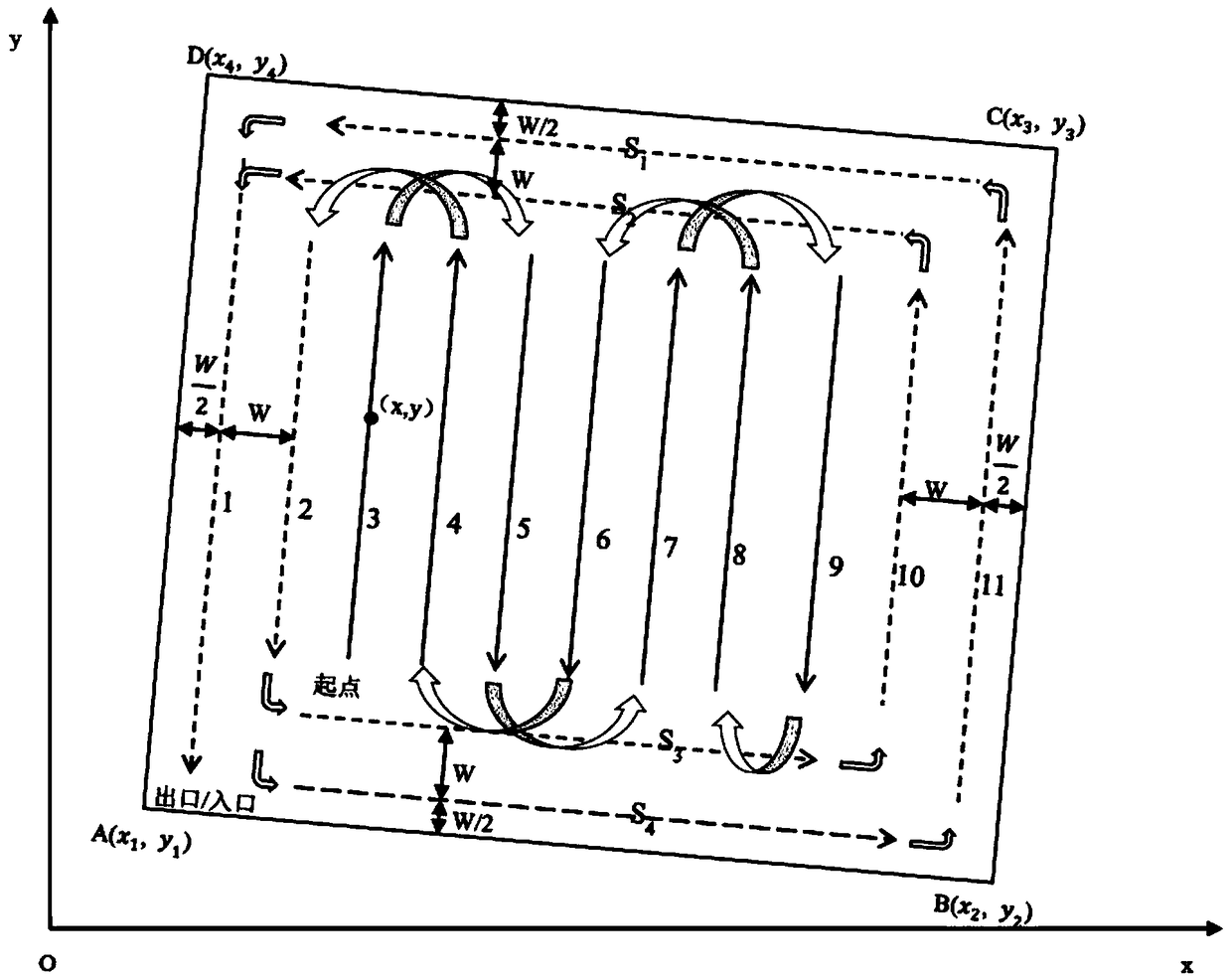
[0034] A method for path planning of an unmanned rice transplanter, characterized in that it comprises the following steps:
[0035] Step 1, obtain the vertex coordinates of the desired operation area.
[0036] Use the Beidou / GPS navigation and positioning device to obtain the four vertex coordinates A(x 1 ,y 1 ), B(x 2 ,y 2 ), C(x 3 ,y 3 ) and D(x 4 ,y 4 ).
[0037]Step 2, calculate the width of the short side and the long side of the area to be operated.
[0038] Considering that the general mechanized rice transplanting fields are in the shape of a parallelogram or close to a parallelogram, the length a of the long side and the length b of the short side are calculated according to the coordinates of the vertices of the field obtained in step 1.
[0039]
[0040]
[0041] If a
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More