Mobile robot motion control system based on QT human-machine interaction interface and motor servo system
A human-computer interaction interface and robot motion technology, applied in general control systems, computer control, program control, etc., can solve the problems of large robot volume, poor control performance, poor versatility, etc., to ensure the operation effect and avoid dead zone problems. , the effect of convenient debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Specific implementation mode one: refer to Figures 1 to 4 Specifically illustrate the present embodiment, the mobile robot motion control system based on the QT human-computer interaction interface and the motor servo system described in the present embodiment,
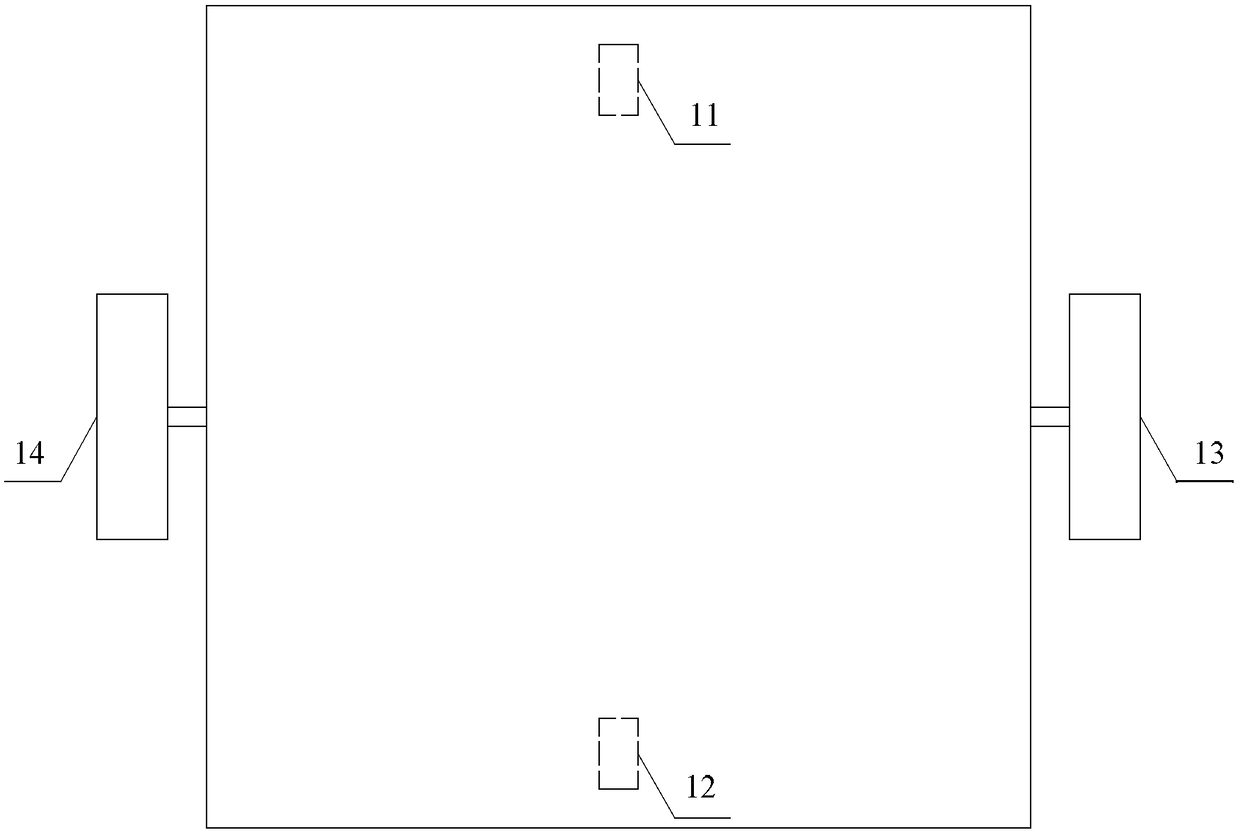
[0025] like figure 1 As shown, the mobile robot has a total of four wheels, which are respectively two driving wheels on the left and right, and two universal wheels on the front and rear. Among them, the two driving wheels are respectively driven by a brushless DC motor. With the help of differential drive, the robot can turn in situ and move flexibly.
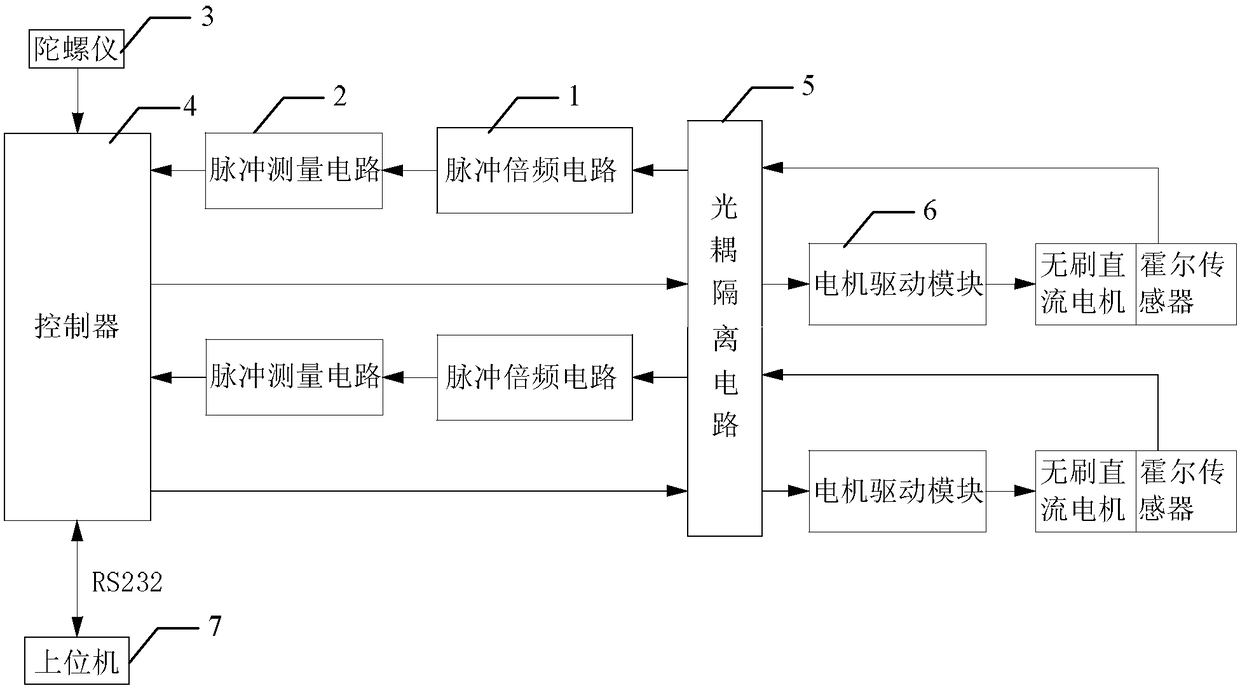
[0026] For the robot with the above two drive wheels, this embodiment adopts the following figure 2 In the control system shown, gyroscope 3, controller 4, optocoupler isolation circuit 5, upper computer 7, 2 motor feedback circuits and 2 motor drive modules 6, each motor feedback circuit includes pulse frequency multiplication circuit 1 and pulse Measur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com