

Detection debugging method of autonomous vehicle throttle control system
A technology of automatic driving and throttle control, applied in general control systems, control/regulation systems, test/monitoring control systems, etc. Other circuit damage and other problems, to achieve the effect of improving production economic benefits, shortening production cycle, and saving production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] This embodiment provides a method for detecting and debugging an accelerator control system of an automatic driving vehicle. A detection and debugging system is used to detect and debug an accelerator control system of an automatic driving vehicle.
[0046] The detection and debugging system is especially suitable for the throttle control system of an automatic driving vehicle.
[0047] 1. Throttle control system for autonomous vehicles
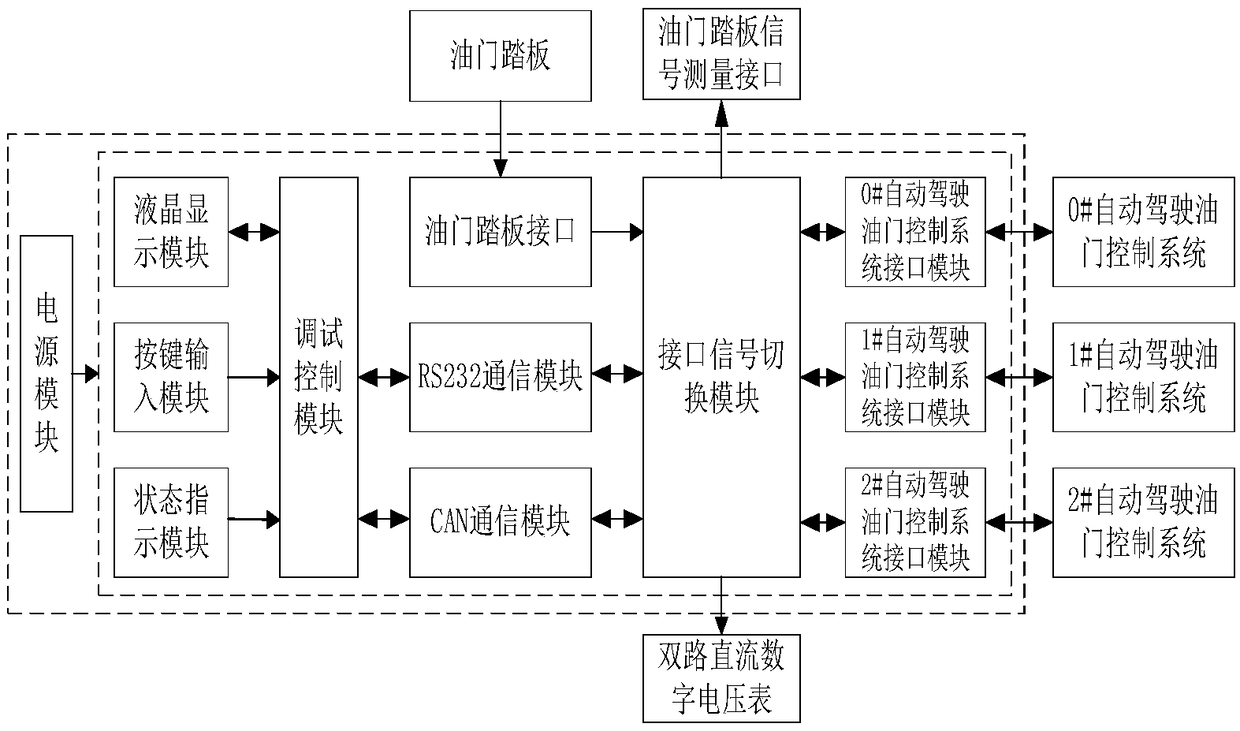
[0048] Such as Figure 17 As shown, the accelerator control system of an automatic driving vehicle includes an accelerator pedal signal switching module, a reference voltage module, an accelerator pedal analog signal generation module, a microcontroller module, a CAN network interface module, a host computer communication interface module, and a power module; the accelerator pedal signal switching The modules are externally connected to the accelerator pedal and the motor electronic control module; the engine electronic control module...
Embodiment 2
[0105] The detection and debugging method of this embodiment adopts a multi-channel rapid detection and debugging platform for the throttle control system of an automatic driving vehicle, which includes the multi-channel rapid detection and debugging system for the throttle control system of an automatic driving vehicle in Embodiment 1.
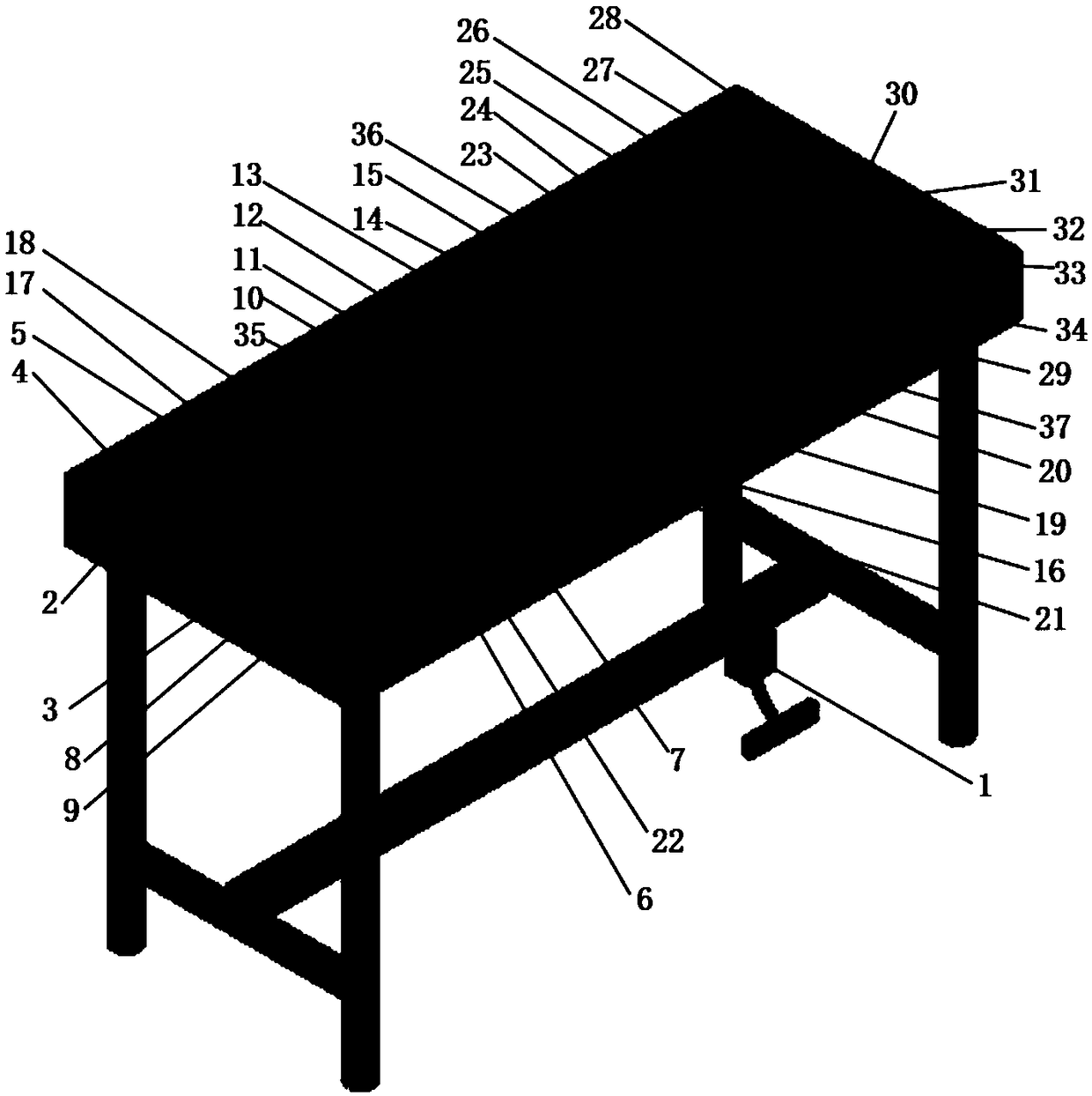
[0106] see figure 1 , the side of the platform is provided with an AC power socket 2 and a main power switch 3; the bottom of the platform is provided with an accelerator pedal device 1, and the accelerator pedal device 1 includes an accelerator pedal and an accelerator pedal position sensor, and the accelerator pedal position sensor is connected to Figure 9 The accelerator pedal sensor interface PS6 in the middle accelerator pedal interface module; the table top of the platform is provided with a power indicator light 4, a manual mode indicator light 17, an automatic mode indicator light 18, a channel 0 indicator light 35, a channel 1 indica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More