

Vehicle-mounted rotor unmanned aerial vehicle recovery device and method based on mechanical grabbing
A technology of unmanned rotor and recovery device, which is applied to parking devices, manipulators, motor vehicles, etc., to achieve the effects of solving human and material resources, avoiding uncertainty, and reducing unfavorable recovery terrain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with examples and specific implementation methods. However, it should not be understood that the scope of the protection subject matter of the present invention is limited to the following embodiments, and all technologies implemented based on the contents of the present invention belong to the scope of the present invention. In order to avoid obscuring the essence of the present invention, well-known methods, procedures, procedures, components and circuits have not been described in detail.
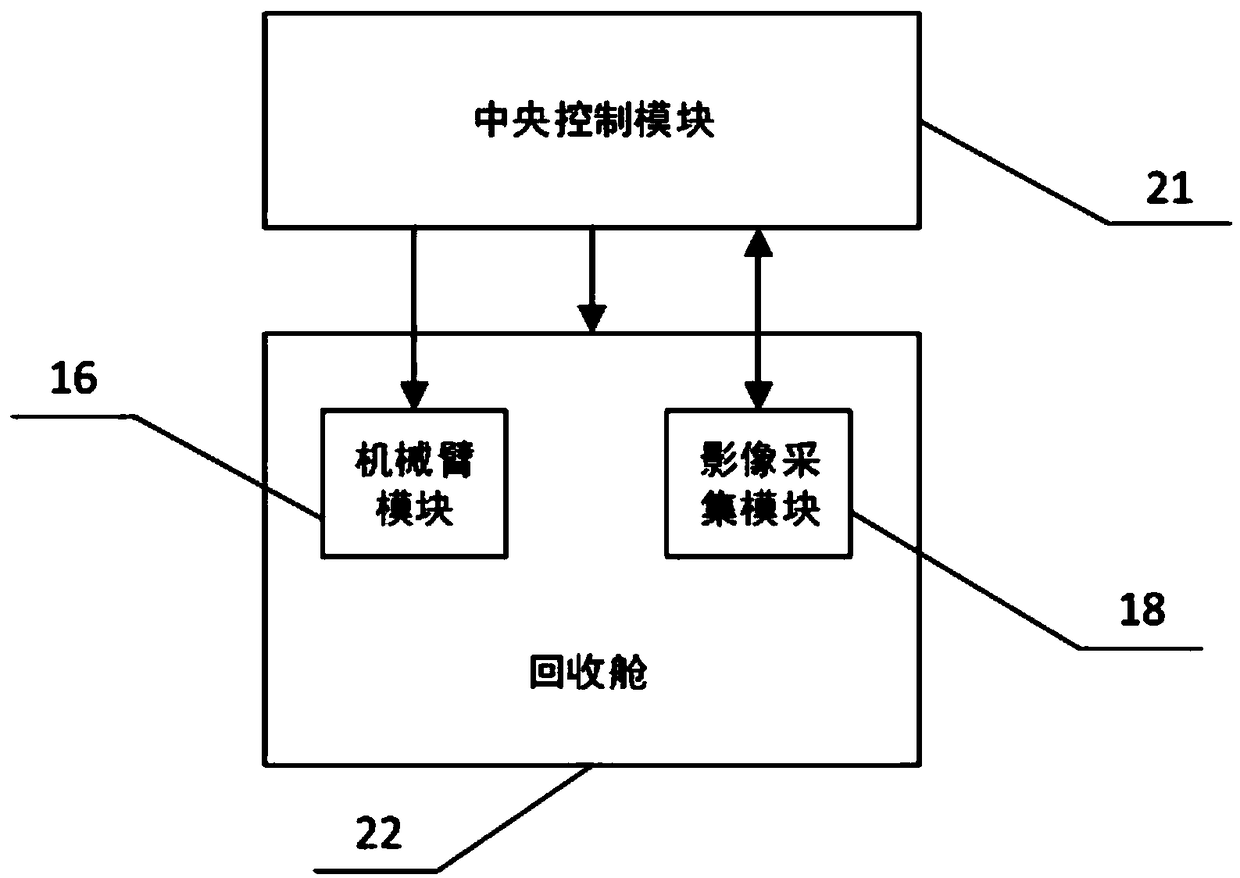
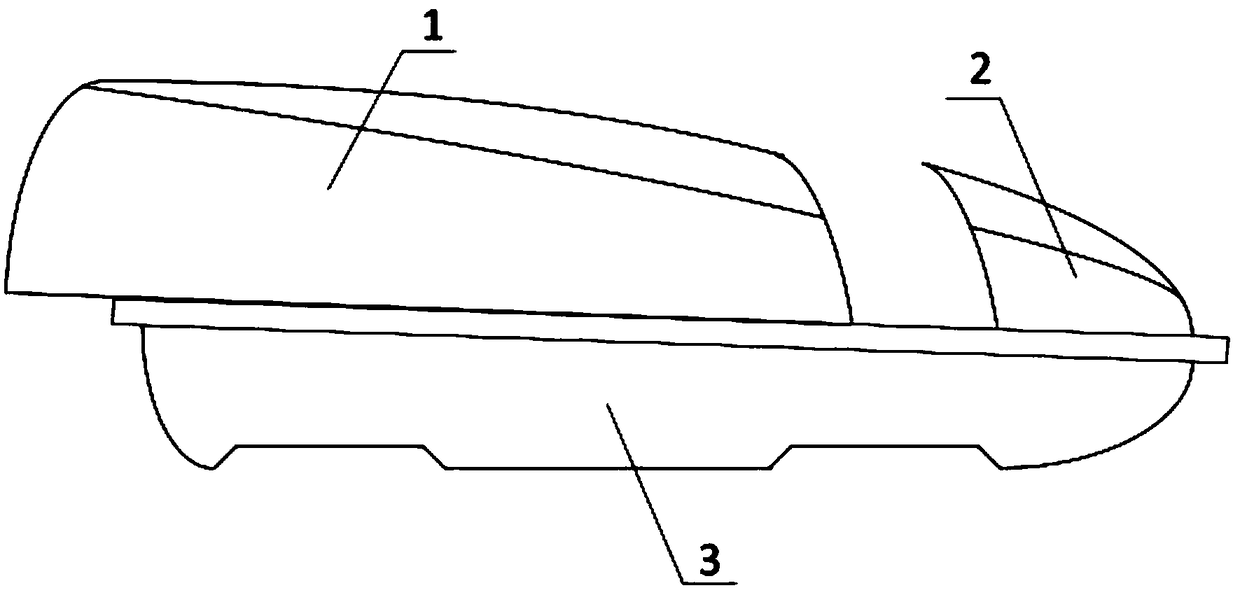
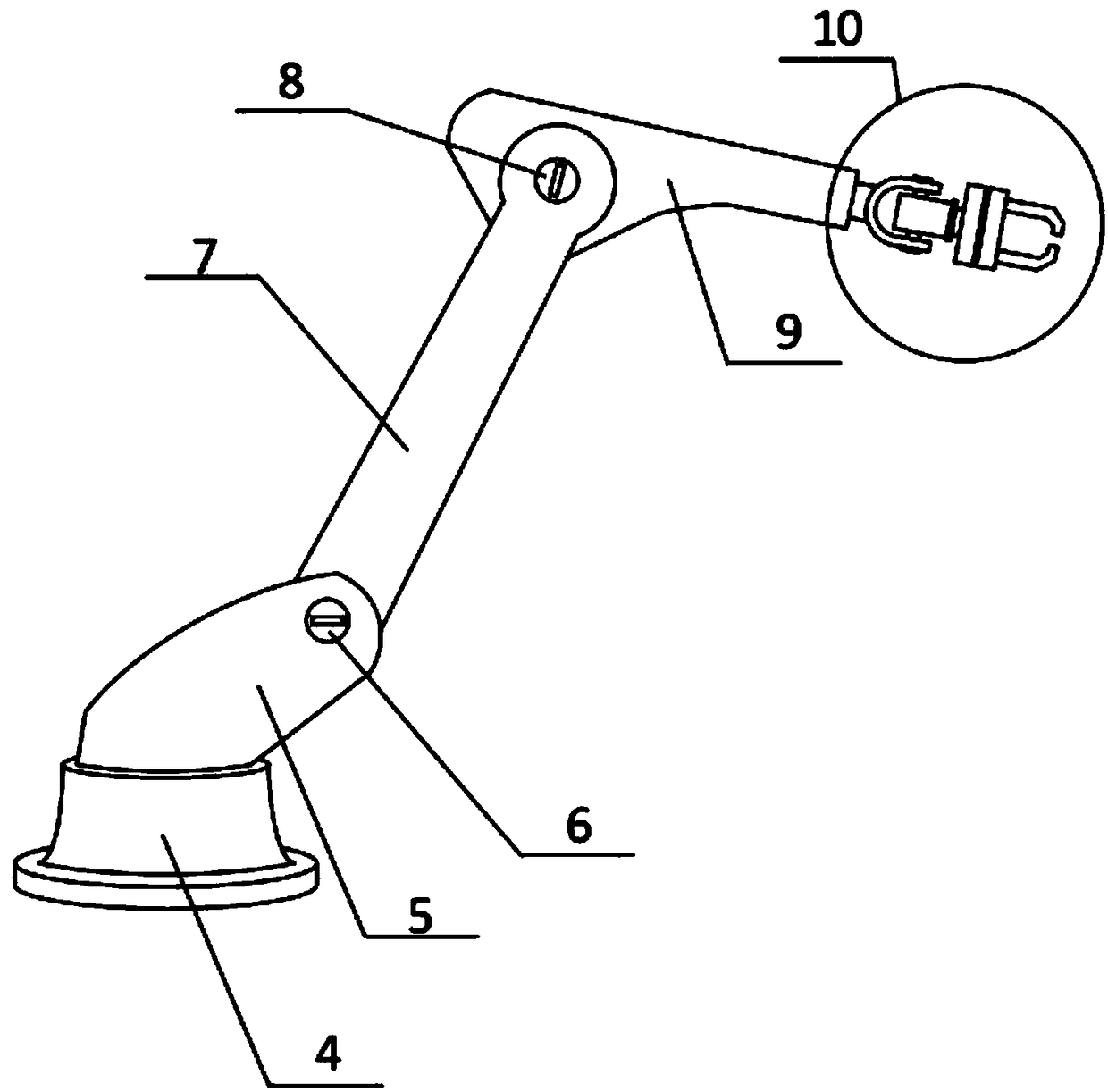
[0038] The vehicle-mounted rotor UAV recovery device based on mechanical grabbing proposed by the present invention, such asfigure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 and Figure 7 As shown, the vehicle-mounted rotor drone recovery device includes a recovery cabin 22 , an image acquisition module 18 , a robotic arm module 16 and a central control module 21 .
[0039] The re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More