

Autonomous tracking control method of rotor aircraft
A technology for rotorcraft and aircraft, which is applied to non-electric variable control, control/regulation systems, three-dimensional position/channel control and other directions, can solve the problems of unstable GPS signals and cannot meet practical application requirements, and achieves small attitude errors and no Source and information-rich, informative effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention is further described in conjunction with accompanying drawings.
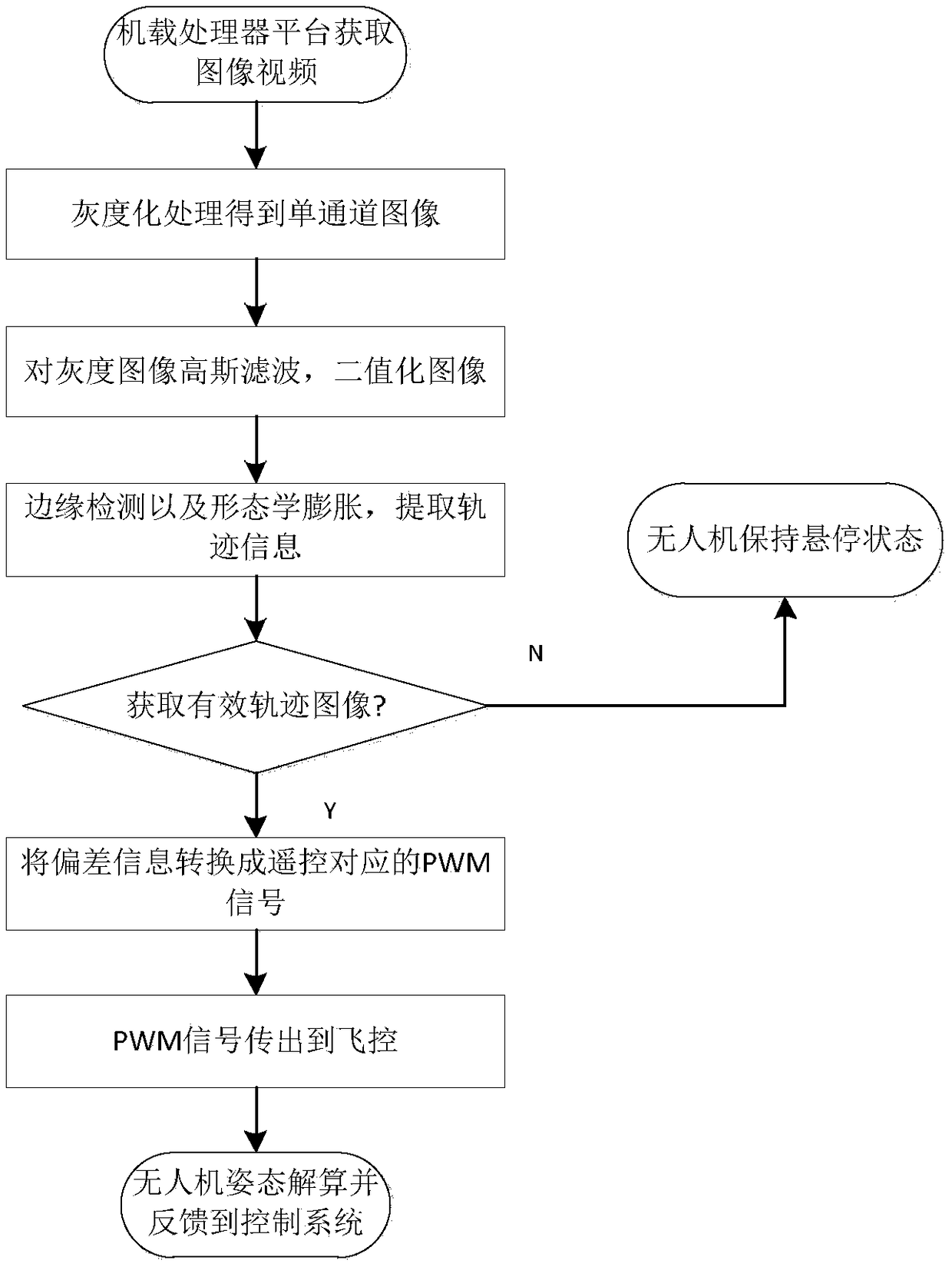
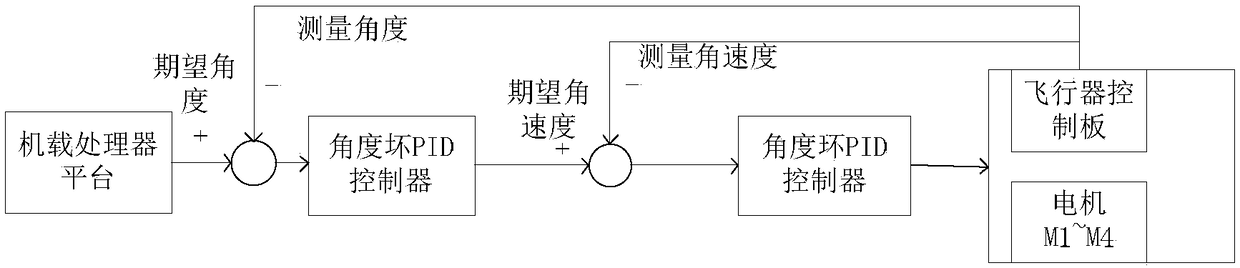
[0040] The specific implementation of the present invention adopts a system mainly composed of an aircraft control module, an airborne processor module, an image acquisition module, an altitude measurement module, a signal receiver and a PC ground station unit. The aircraft is equipped with a camera, an aircraft control module, an onboard processor module, an image acquisition module, an altitude measurement module, and a signal receiver. The camera is connected directly under the center of the aircraft body through a three-axis gimbal; the PC ground station unit and the aircraft are connected through The image transmission module is connected; the altitude measurement module is connected with the on-board processor module, the on-board processor module is connected with the camera after the image acquisition module, the on-board processor module is connected to the aircraft control m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More