

Unmanned aerial vehicle (UAV) line patrol flight control system and method
A flight control system and flight control technology, applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc., can solve problems affecting trajectory detection, interference, and difficult to accurately identify the trajectory, and achieve system Good stability and good system hierarchy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] Embodiment 1: see figure 1 Figure, a UAV line inspection flight control system, including multi-rotor UAV, data acquisition components and controller;
[0082] The data acquisition component is arranged on the drone and includes a camera, an optical flow sensor and a barometer;
[0083] The camera is used to collect images, the optical flow sensor is used for indoor positioning, and the barometer is used to measure height;
[0084] The unmanned aerial vehicle in the present invention is a multi-rotor unmanned aerial vehicle, and the multi-rotor unmanned aerial vehicle is made up of frame, motor, rotary blade, flight control and data acquisition assembly namely various sensors. Among them, the sensors mainly include a camera for capturing images, an optical flow sensor for indoor positioning, a barometer for measuring altitude, an accelerometer, a gyroscope, and so on. The video images captured by the camera and the data collected by other sensors are sent to the contr...
Embodiment 2
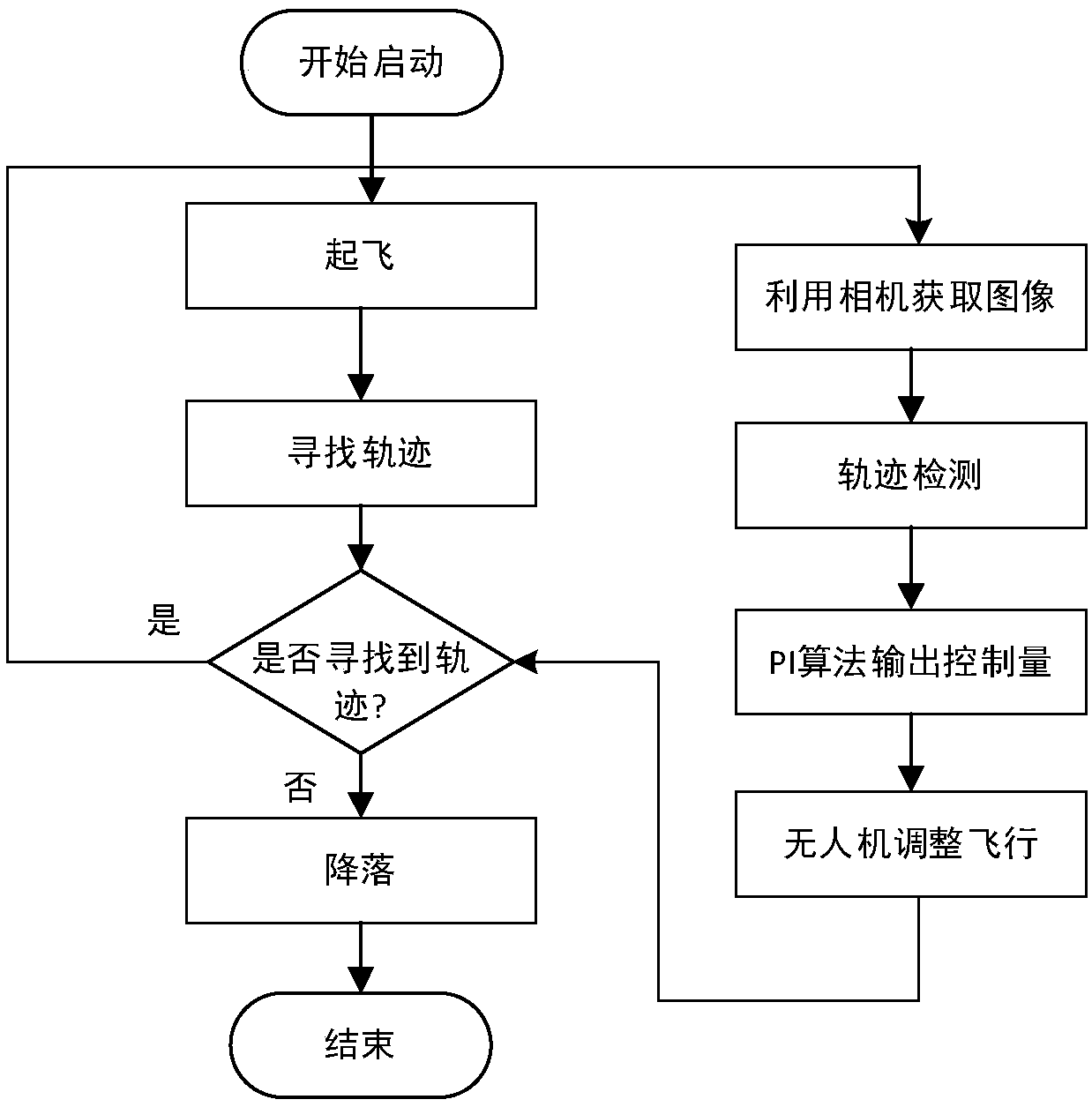
[0090] Example 2: see Figure 3 to Figure 7 An unmanned aerial vehicle line inspection flight method, adopts the unmanned aerial vehicle line inspection flight control system described in embodiment 1;
[0091] The steps of the UAV line inspection flight method are as follows:
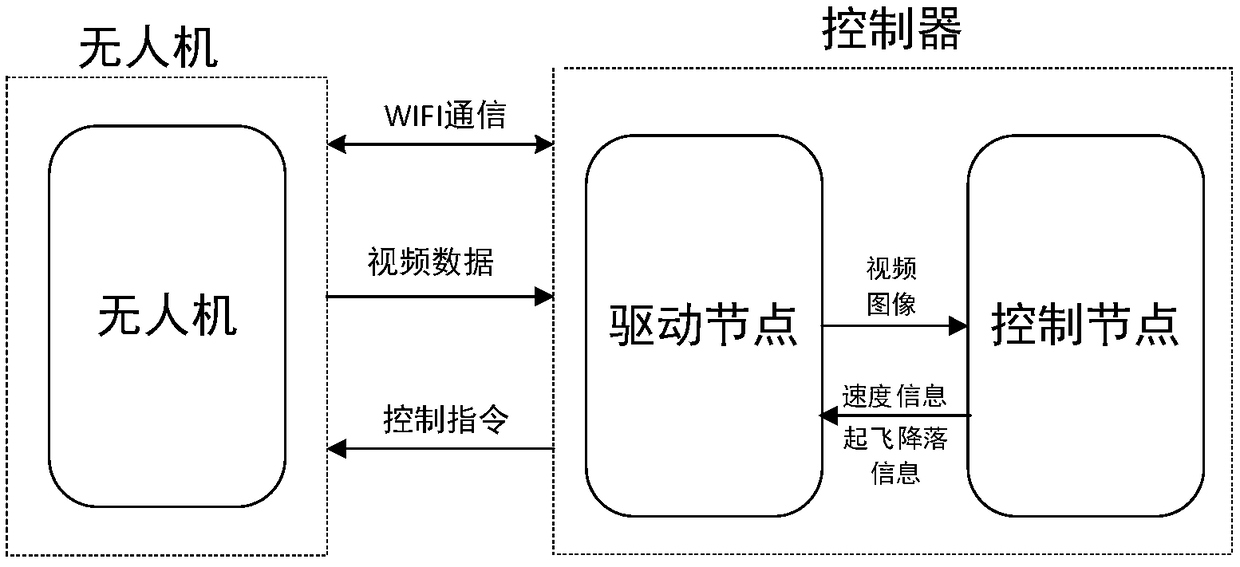
[0092] S1: Start the drone and controller, connect to WIFI: Start the driver node of the drone, set up the drone, start the line patrol flight control node, and take off the drone. After the drone takes off, use manual control to control the drone. The man-machine flies above the track and starts patrolling the line;
[0093] S2: The UAV sends the video data captured by the camera to the controller at a fixed frequency through WIFI. The UAV driver node in the controller receives the video image data sent, converts the format of the video image data and sends it to the line patrol Flight control node (since the video data is transmitted through the WIFI network, it is necessary to decompress the video...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More