

Method for acquiring 3d (three-dimensional) coordinates of human skeleton joint points on basis of deep learning
A technology of deep learning and acquisition method, which is applied in the field of acquiring three-dimensional coordinates of human skeleton joint points, can solve the problems of many hardware assistance, large use limitations, and unfavorable popularization and promotion, and achieves the effect of reducing the amount of calculation and the cost of hardware.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0069] The specific implementations / examples described here are specific specific implementations of the present invention, and are used to illustrate the concept of the present invention. limit. In addition to the embodiments described here, those skilled in the art can also adopt other obvious technical solutions based on the claims of the application and the contents disclosed in the description, and these technical solutions include adopting any obvious changes made to the embodiments described here. The replacement and modified technical solutions are all within the protection scope of the present invention.
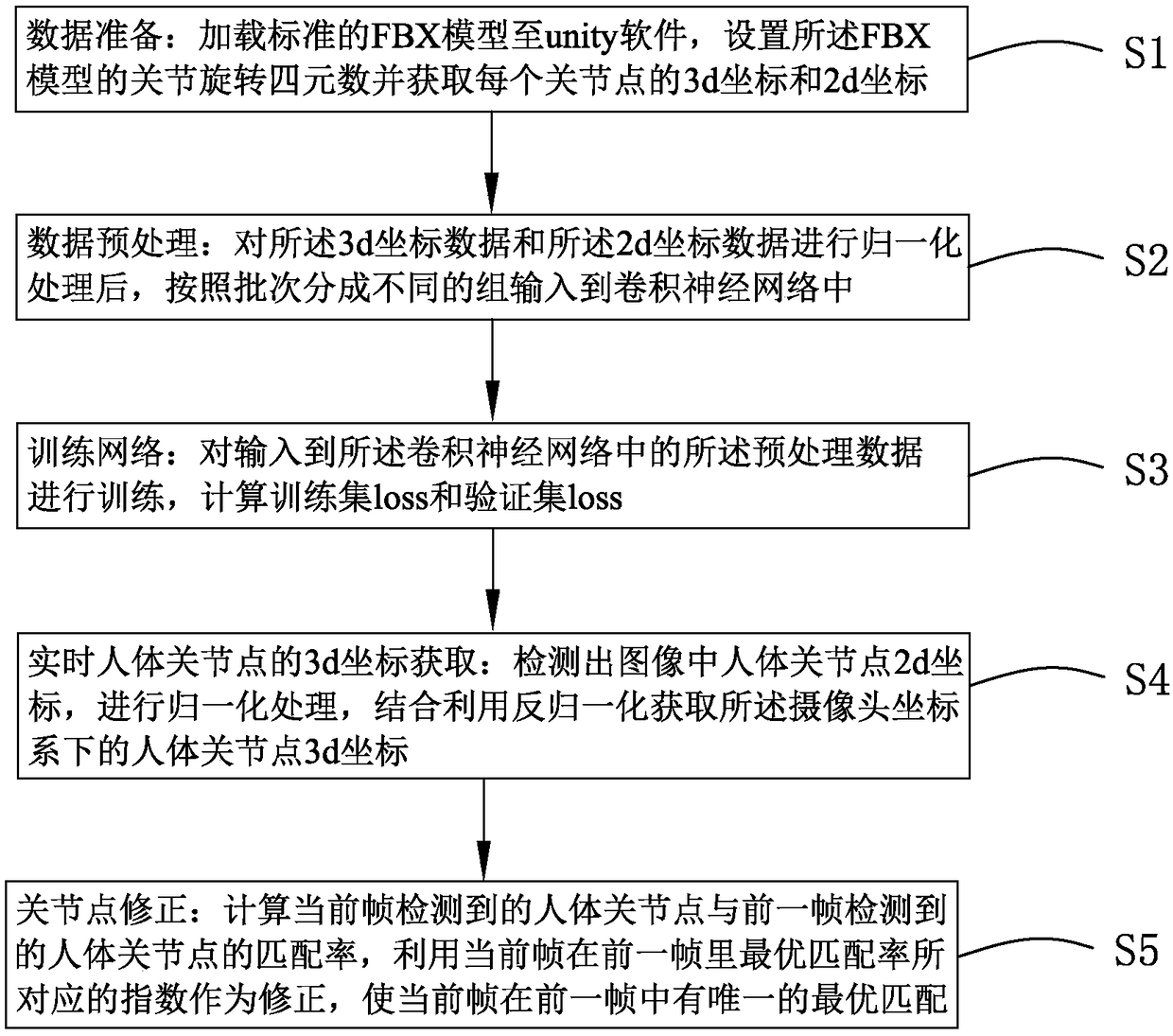
[0070] Please refer to figure 1 As shown, the present invention provides a method for acquiring three-dimensional coordinates of joint points of human bones based on deep learning. In this embodiment, the so-called 2d coordinates...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More