

Autonomous underwater vehicle propeller fault diagnosis method based on improved isometric feature mapping algorithm ISOMAP
A technology of isometric feature mapping and underwater robots, which is applied to computer components, instruments, calculations, etc., can solve problems such as poor feature extraction capabilities, failure to detect faults and identify faults, and unstable extraction results, etc., to improve The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings.
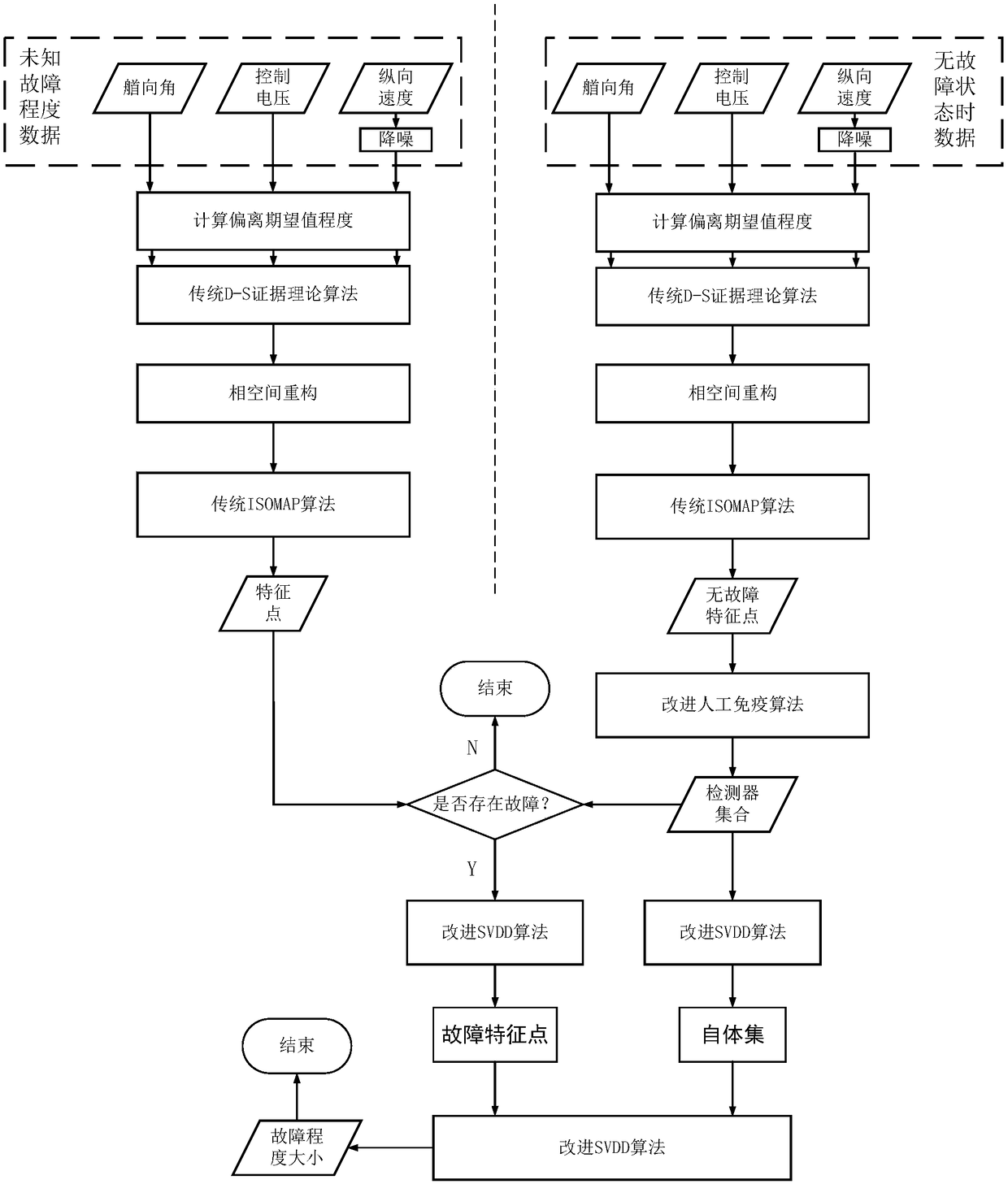
[0034] figure 1 It is the AUV thruster fault diagnosis flowchart of the present invention. to combine figure 1 , the specific implementation steps of the underwater robot thruster fault diagnosis method based on the improved isometric feature mapping algorithm are as follows:
[0035] (1) Construct a one-dimensional feature vector:
[0036] The wavelet noise reduction process is performed on the AUV longitudinal velocity signal in the state of no fault data and the longitudinal velocity of the AUV in the unknown state, and the wavelet base is DB4 wavelet. Then, the degree to which the AUV heading angle signal, the control voltage signal and the noise-reduced longitudinal velocity signal deviate from its own expected value is calculated respectively, and three sets of one-dimensional vectors are obtained. Based on the D-S evidence theory, the data fusion o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More