

A Target Equivalent Rotation Center Estimation Method for Bistatic ISAR
A rotation center and bistatic technology, applied to radio wave measurement systems, instruments, etc., can solve the problems of low estimation accuracy of the rotation center, low accuracy of the rotation center position, and difficulty in finding, so as to improve the estimation accuracy and reliability, and improve the application range effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0028] combine Figure 1 to Figure 9 Examples in this application will be described.
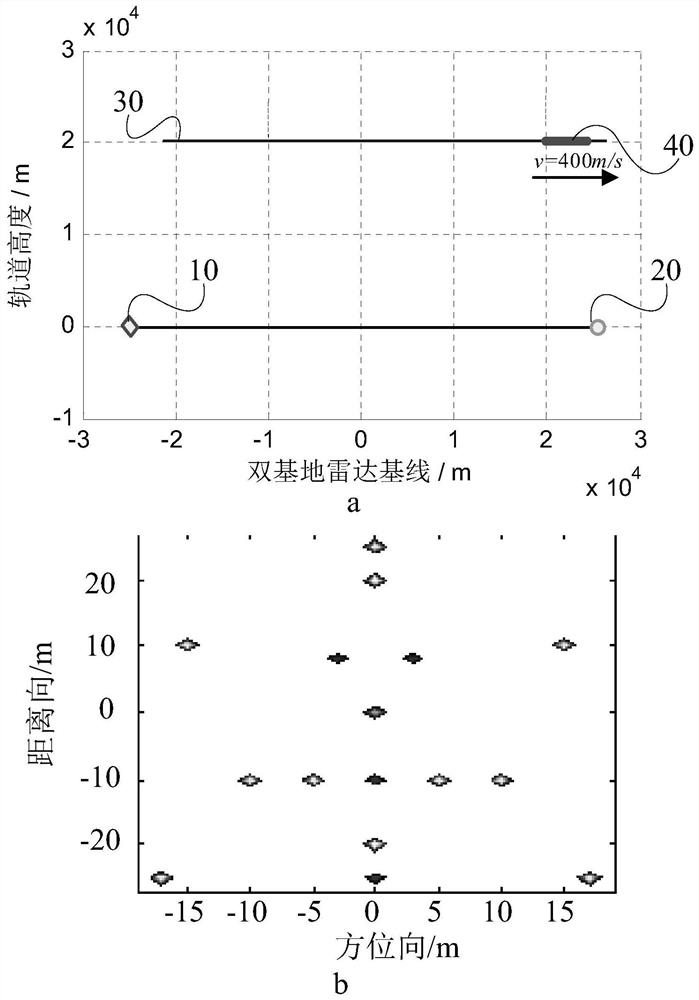
[0029] figure 1 A simulation diagram of a simulation model according to an embodiment of the present invention is shown.
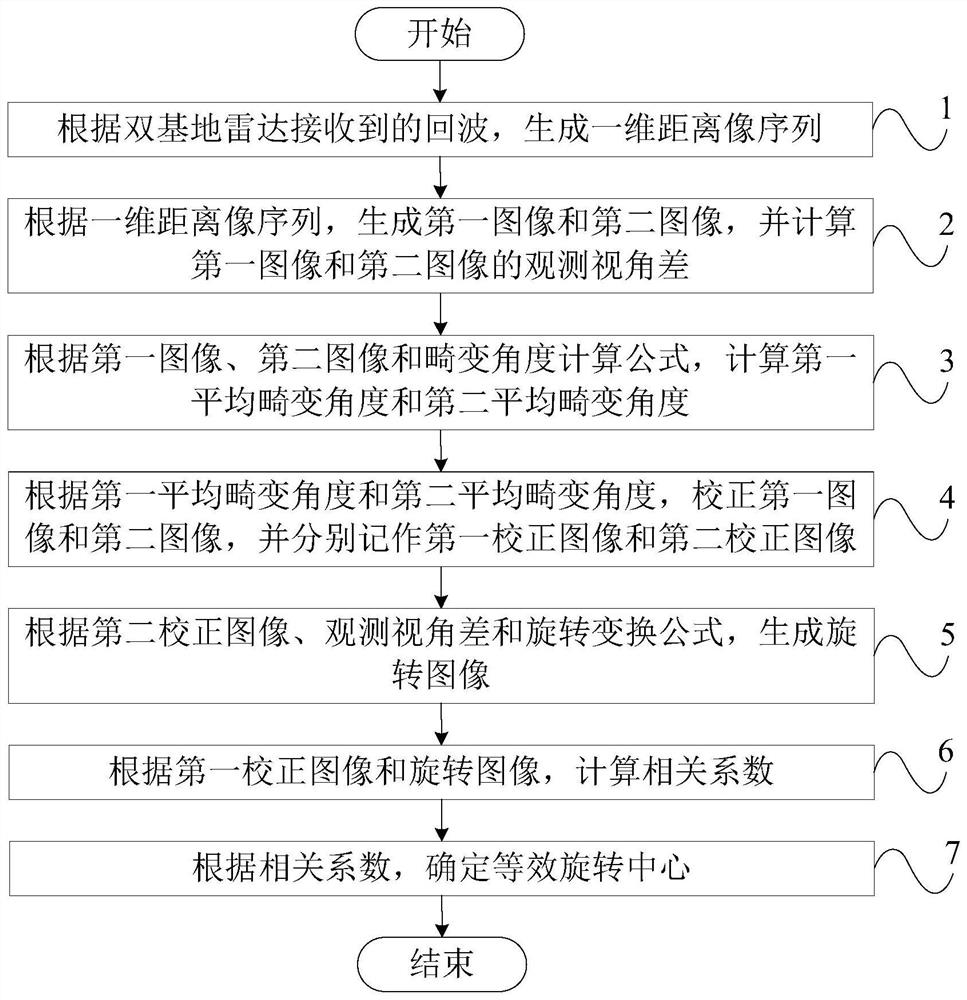
[0030] figure 2 A schematic flowchart of a method for estimating an equivalent center of rotation of a target for bistatic ISAR according to an embodiment of the present invention is shown.
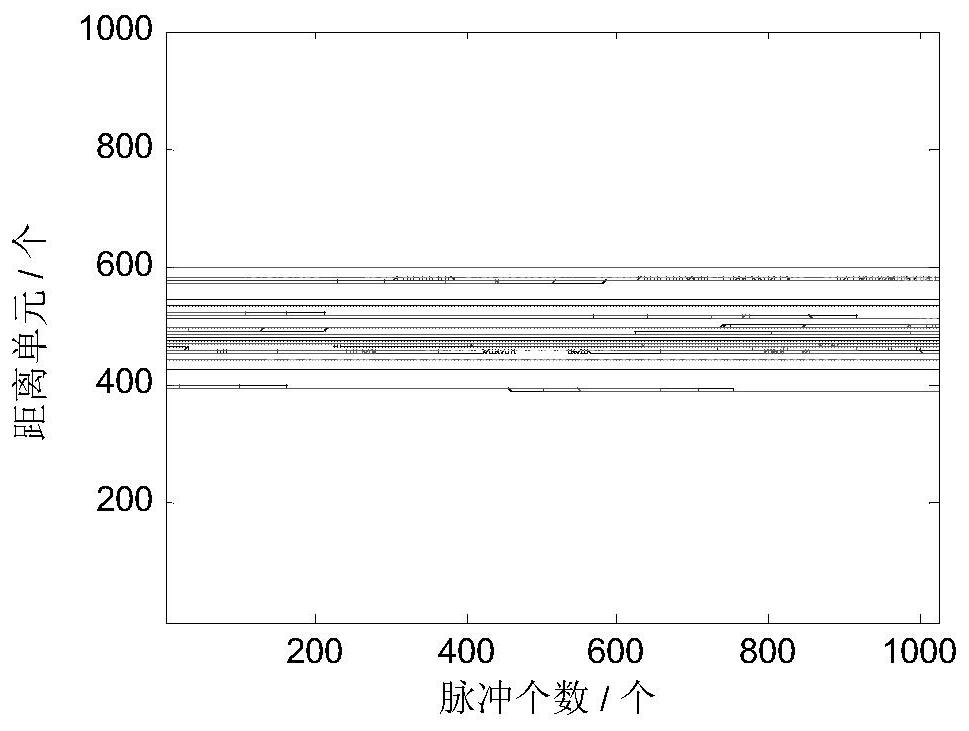
[0031] image 3 A simulation diagram of a one-dimensional range image sequence according to an embodiment of the present invention is shown.
[0032] Figure 4 A simulation diagram of grouped images of a one-dimensional range image sequence according to an embodiment of the present invention is shown.
[0033] Figure 5 A simulation diagram of group imaging according to one embodiment of the present invention is shown.
[0034] Image 6 A simulation graph showing the change curves of cumulative rotation angle, bistatic angle, and image distortion angle according to an embo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More