

Vehicle positioning method based on vision, GPS and high-precision map fusion
A technology for GPS positioning and vehicle positioning, applied in the field of safe assisted driving, can solve the problems of low GPS positioning accuracy, cumulative errors in visual positioning, and inability to global positioning, and achieve the effects of strong robustness, high accuracy and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
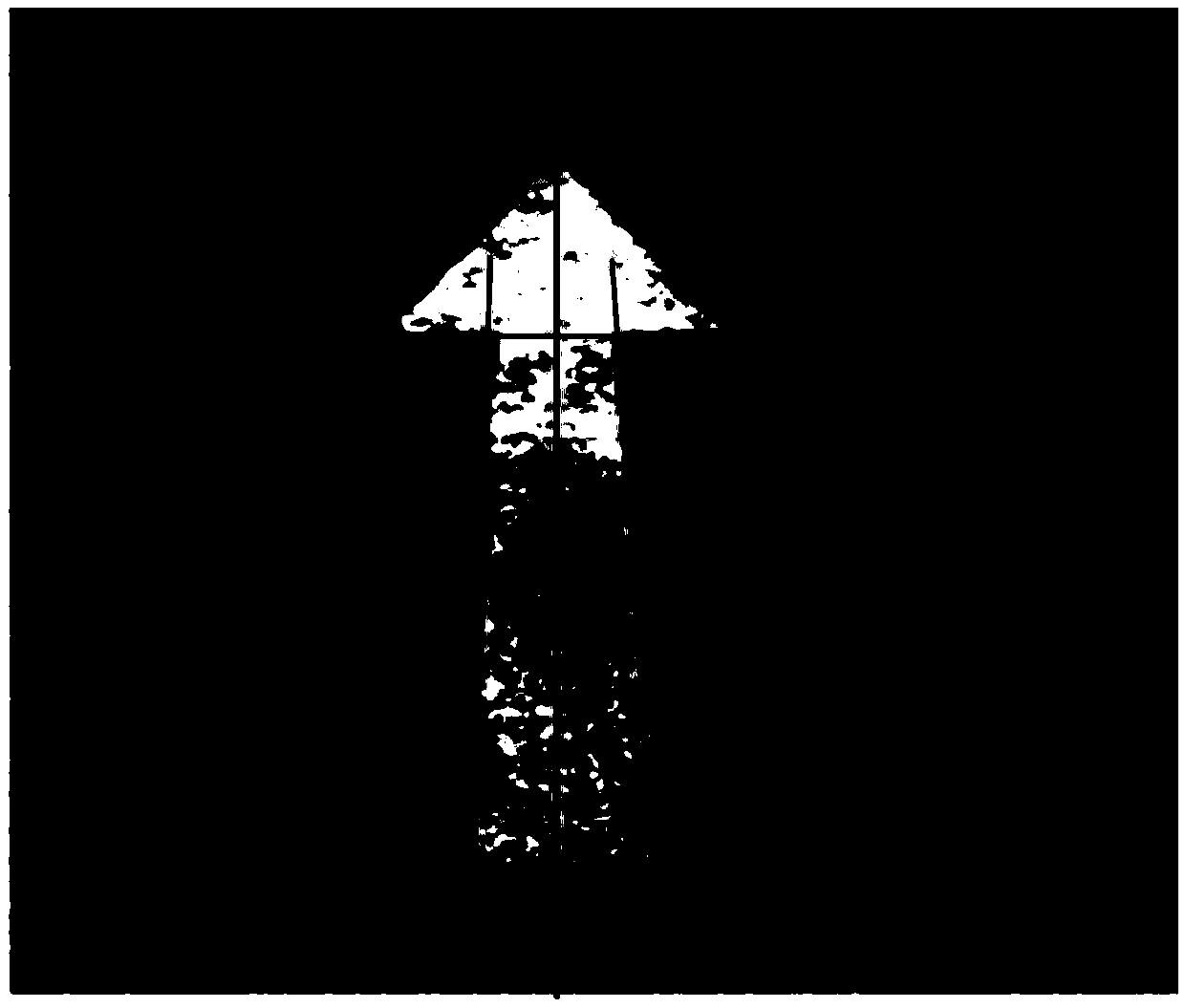
[0088] In this embodiment, Shouqin Road and Xuexi Road of Hebei University of Technology are used as test sites, and the straight arrows of the sites are used as experimental reference objects. All pictures taken by the vehicle-mounted camera system are 640*480 (pixels).
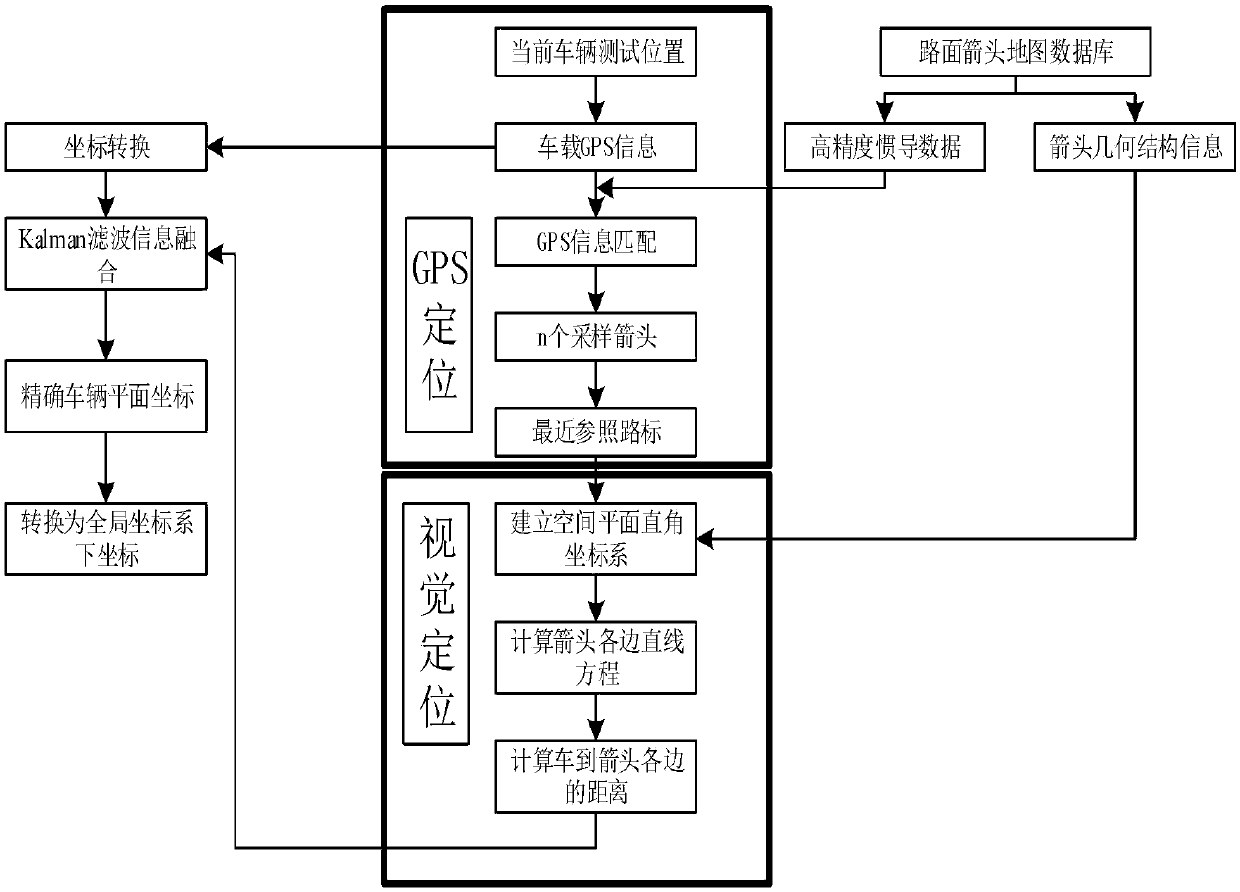
[0089] In this embodiment, the vehicle positioning method based on fusion of vision, GPS and high-precision map includes the following steps:
[0090] The first step is to build a high-precision road arrow map:
[0091] 1-1. Map data collection:
[0092] The vehicle-mounted camera is placed behind the windshield, with a height of 123cm, looking down at an angle of about 30 degrees, and the camera is kept in a fixed position during the experiment. Shoot when there are indicating arrows on the road surface, and at the same time use GPS receiver, integrated inertial navigation system and DGPS base station to collect high-precision inertial navigation data of the arrow, and use measuring tools (tape measure, sq...
Embodiment 2
[0119] Select Ziqiang Road, Chengxue Road, and Xuexi Road of Hebei University of Technology as the test site. In addition to straight arrows, it also includes various other types of arrows, such as right turn, left turn, double turn, right turn plus straight, etc., respectively. Other types of arrows are fused and positioned with reference to the nearest landmarks, and 15 sets of positioning experiments are carried out for each type of arrow at different locations, and other experimental procedures are the same as in Example 1.
[0120] After a series of vehicle positioning experiments using the arrow as a reference, comparing the error comparison results of GPS positioning and fusion positioning, it is proved that the method of the present invention can improve the positioning accuracy of the vehicle, and the positioning accuracy reaches centimeter level.
[0121] What is not mentioned in the present invention is applicable to the prior art.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More