

Method and system for extracting color point cloud in laser-scanned target object
A technology for target objects and color point clouds, applied in radio wave measurement systems, instruments, etc., can solve problems such as complex registration algorithms, affecting the accuracy of point cloud data processing results, and poor practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
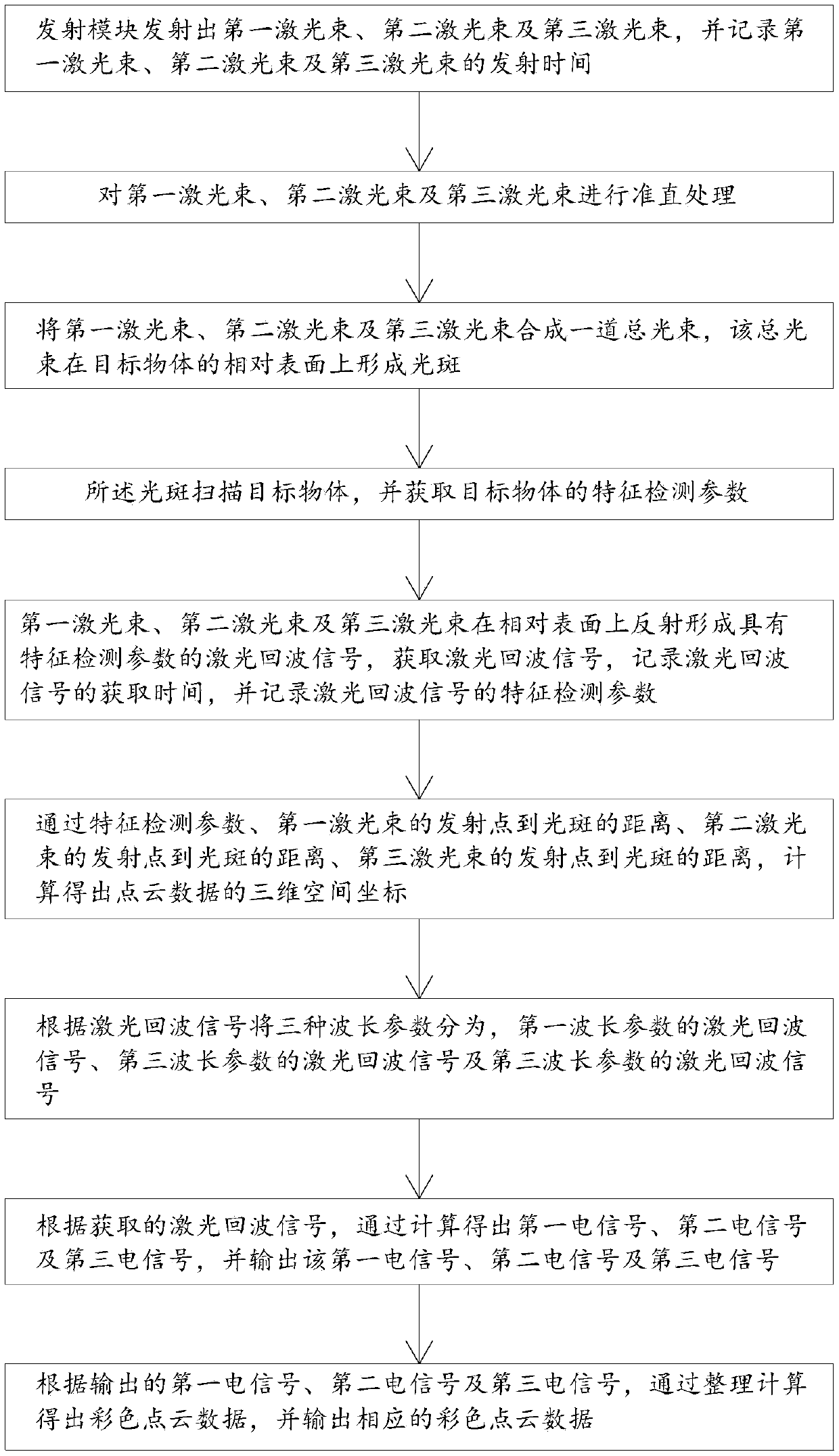
[0076] Such as Figure 1 to Figure 2 As shown, the method for extracting the color point cloud in the laser scanning target object includes the following steps: the transmitting module emits the first laser beam, the second laser beam and the third laser beam, and records the first laser beam, the second laser beam and the The emission time of the third laser beam; the first laser beam, the second laser beam and the third laser beam form light spots on the opposite surface of the target object, and the light spot scans the target object; the first laser beam, the second laser beam and the second laser beam The three laser beams reflect on the opposite surface to form laser echo signals with characteristic detection parameters, obtain the laser echo signals, record the acquisition time of the laser echo signals, and record the characteristic detection parameters of the laser echo signals; according to the acquired laser echo signals Wave signal, the first electrical signal, the...
Embodiment 2
[0126] Such as image 3 As shown, compared with Embodiment 1 in this embodiment, the method for extracting the color point cloud in the laser scanning target object further includes the following steps:
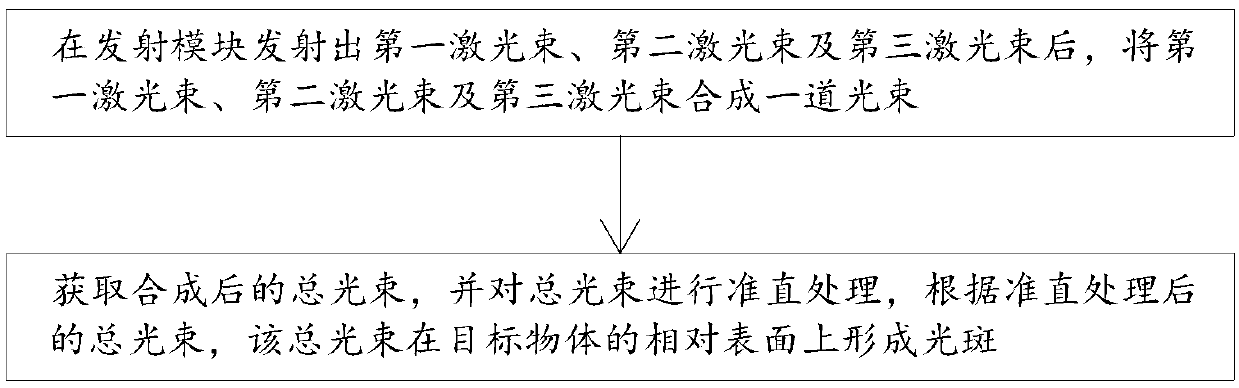
[0127] After the transmitting module emits the first laser beam, the second laser beam and the third laser beam, synthesize the first laser beam, the second laser beam and the third laser beam into a total beam;
[0128] The combined total beam is acquired and collimated. According to the collimated total beam, the total beam forms a light spot on the opposite surface of the target object.
[0129] This embodiment has the following advantages:
[0130] 1. Synthesize the emitted first laser beam, second laser beam and third laser beam; then collimate the total beam after synthesis;
[0131] The light beam is firstly combined and then collimated. In the case of low angular resolution, only one collimation module is needed, which is beneficial to reduce the production and / or p...
Embodiment 3
[0133] Such as Figure 4 As shown, compared with Embodiment 1 in this embodiment, the method for extracting the color point cloud in the laser scanning target object further includes the following steps:
[0134] After the transmitting module emits the first laser beam, the second laser beam and the third laser beam, the first laser beam, the second laser beam and the third laser beam are collimated respectively, and the emitted first laser beam , the second laser beam and the third laser beam are arranged in parallel with each other;
[0135] Light spots are formed on opposite surfaces of the target object according to the collimated first laser beam, second laser beam and third laser beam.
[0136] This embodiment has the following advantages:
[0137] 1. The emitted first laser beam, second laser beam and third laser beam are arranged in parallel with each other. This setting does not need to perform combined light processing on the first laser beam, second laser beam and...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Wavelength | aaaaa | aaaaa |
| Wavelength | aaaaa | aaaaa |
| Wavelength | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More