

Dynamic parameter identification based PTP (peer to peer) acceleration optimization method and device
A technology of dynamic parameters and optimization methods, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reducer impact, damaged reducer, unfavorable trajectory tracking control, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
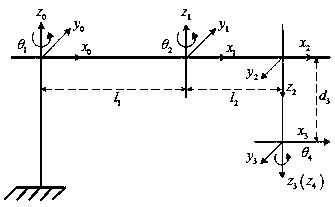
[0057] SCARA robot structure such as Figure 5 shown.
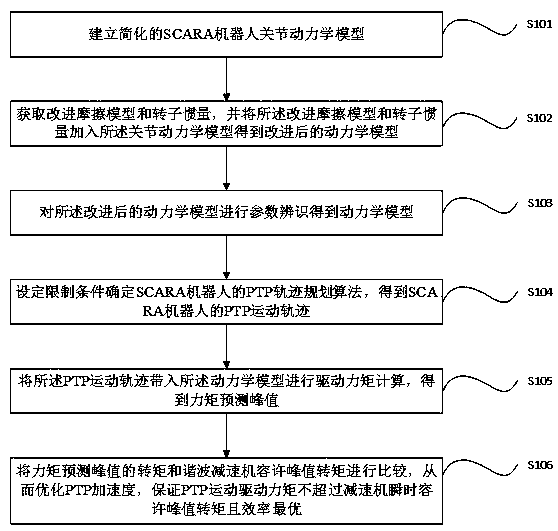
[0058] Such as figure 1 and Figure 6 As shown, a PTP acceleration optimization method based on dynamic parameter identification includes:
[0059] S101: Establish a simplified SCARA robot joint dynamics model;
[0060] According to the structure of SCARA robot, a simplified dynamic model of two joints of SCARA robot is established by Lagrange method;
[0061] The dynamic equation of the robot system with n joints is:
[0062]
[0063] In the formula, q is the rotation angle vector, and its 1st and 2nd derivatives are the angular velocity and angular acceleration vectors respectively, D(q) is the n-or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More