

Logistics center carrying robot path planning method based on traffic jamming control
A technology for handling robots and logistics centers, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc. problems, to achieve the effect of shortening the system running time and reducing the burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] A method for path planning of a logistics center handling robot based on traffic congestion control, comprising the following steps:
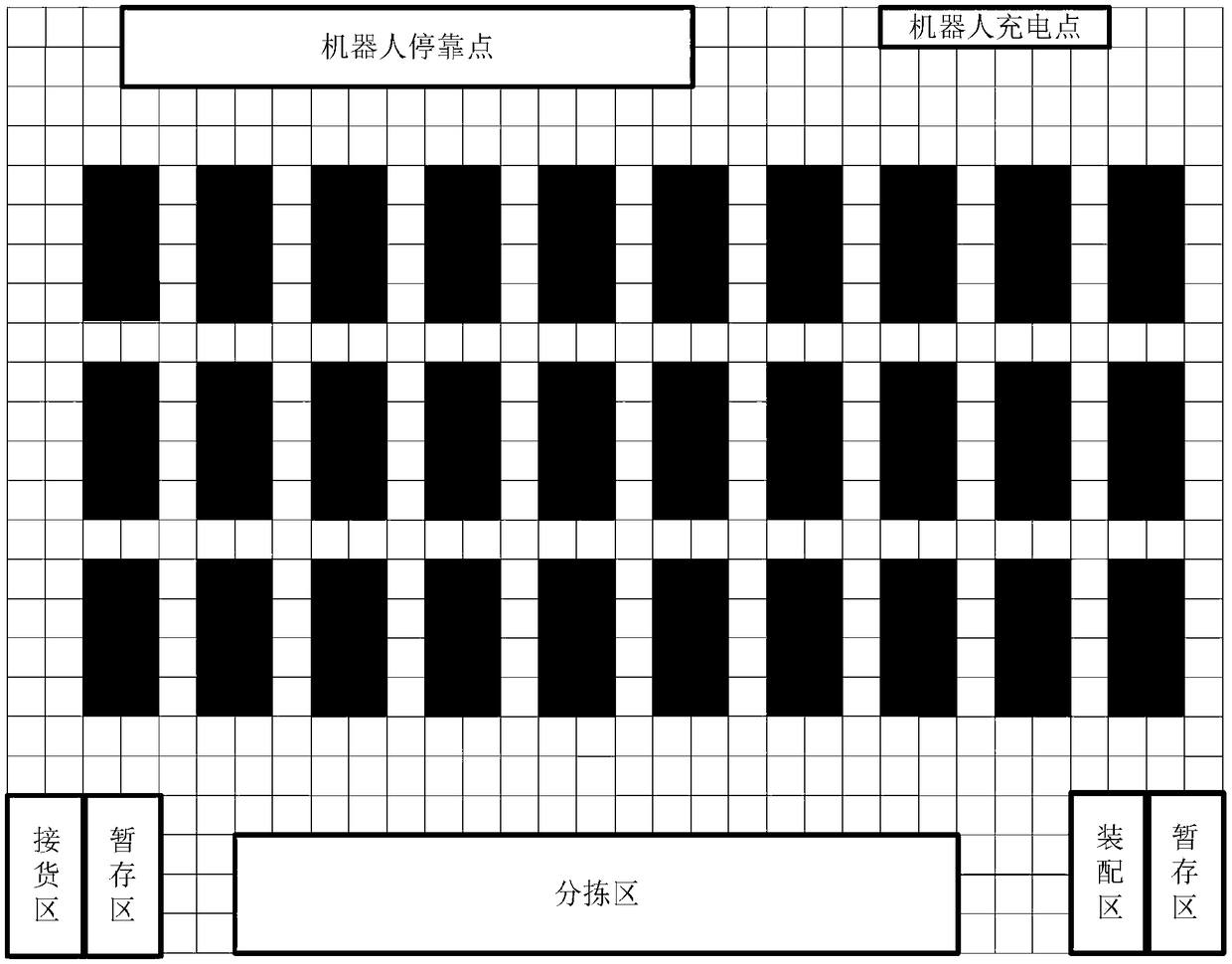
[0041] Step 1: Create a grid map of the robot's working environment, such as figure 1 ; The map is modeled by the grid method: the logistics center is divided into a square network, and the two-dimensional code is placed on the nodes of the regular square grid, and the side length of each square is equal to 2 meters. A node represents a grid, the number of grids: 30~35×20~25;
[0042] Among them, the working environment of the handling robot in the logistics center includes: multiple mobile robots move in the logistics center at the same time. In order to avoid collisions and improve the safety and robustness of the system operation, the passage between the shelves is a single-row lane, and the black grid indicates the shelf. ;The logistics center includes robot docking points, robot charging points, receiving areas, temporary storage a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More