

Restrained multi-agent formation method based on speed planning
A speed planning and multi-agent technology, applied in the field of robotics, can solve problems affecting system performance and achieve high security effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
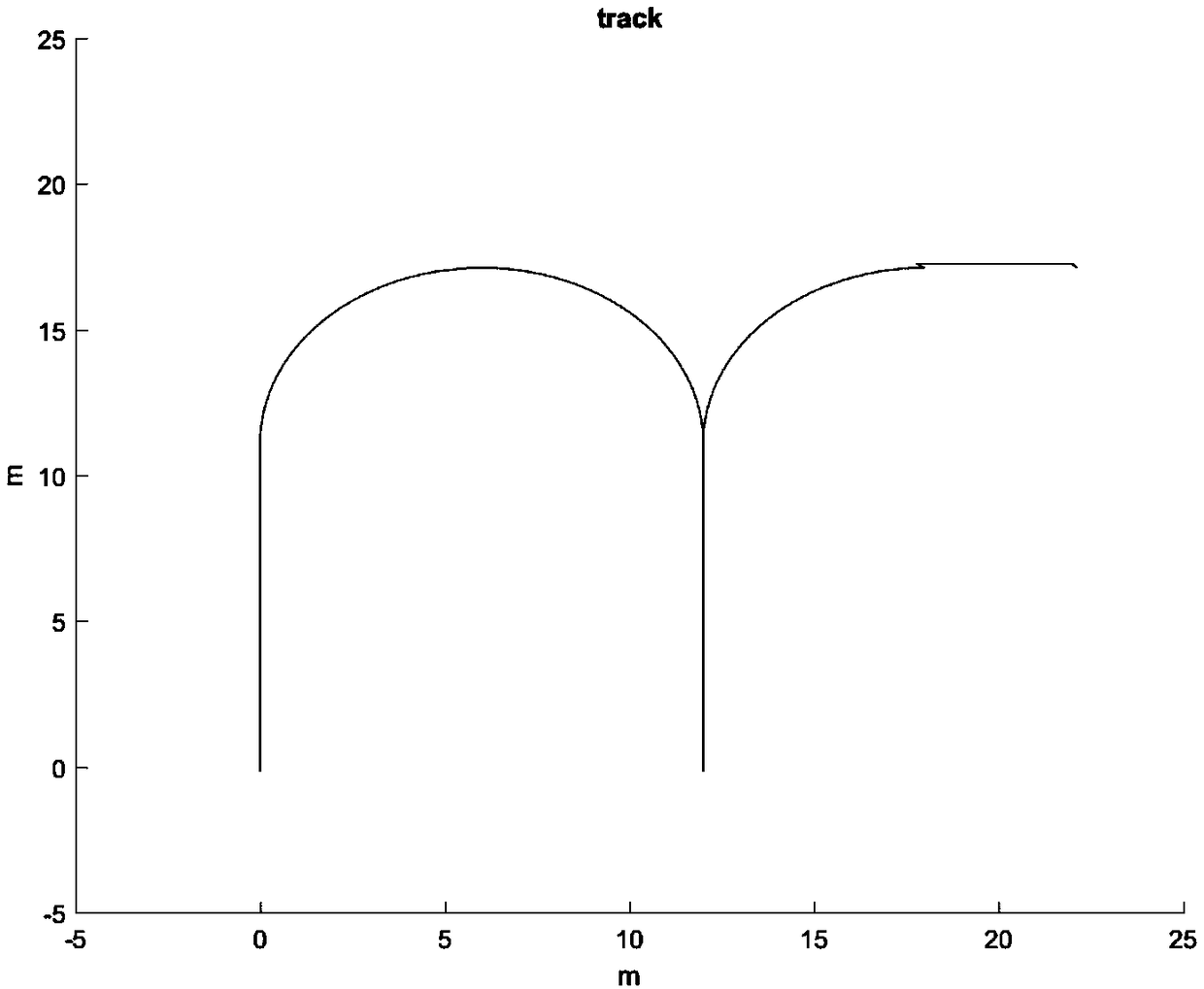
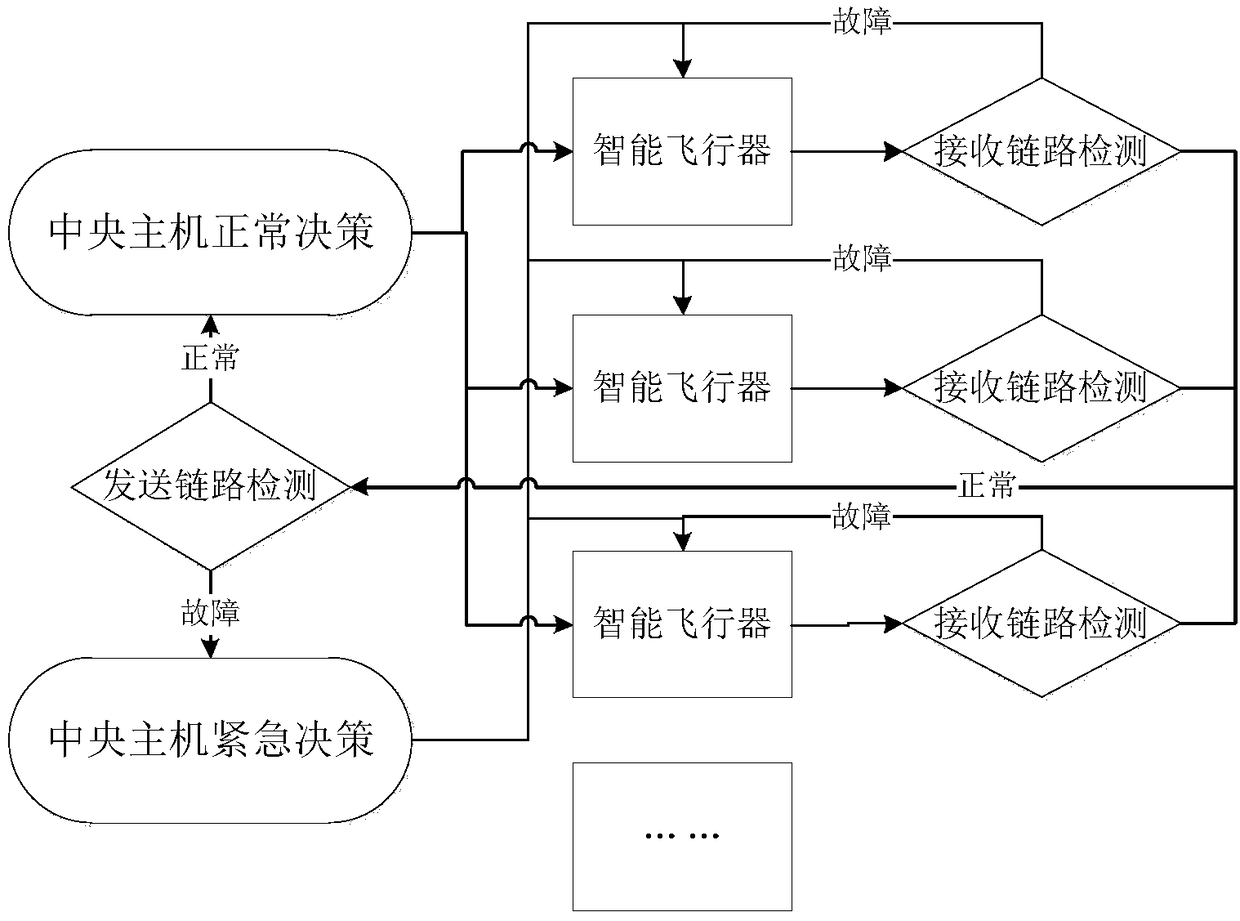
[0043] The object of the invention is to propose a centralized formation method based on speed planning for the constrained multi-agent system.
[0044] This formation method adopts the Leader-Follower method. The system consists of a central decision-making host, a single intelligent aircraft, and a weakly elastic lightweight rope net (10m*10m). The weakly elastic rope net is pulled by multiple intelligent aircraft. Due to the existence of the rope net, there are certain constraints on the multi-aircraft formation structure and structure transformation.
[0045] When flying in formation, the central host will generate a virtual leader, and other intelligent aircraft performing tasks will act as followers to track points in a given formation structure.
[0046] The specific steps of this formation control method include:
[0047] 1. According to the establishe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More