An automatic control method and system for a grab-type cleaning machine
A technology of cleaning machine and grab bucket, which is used in electric controllers, controllers with continuous output signals, and cleaning of open water surfaces. , increase equipment loss, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
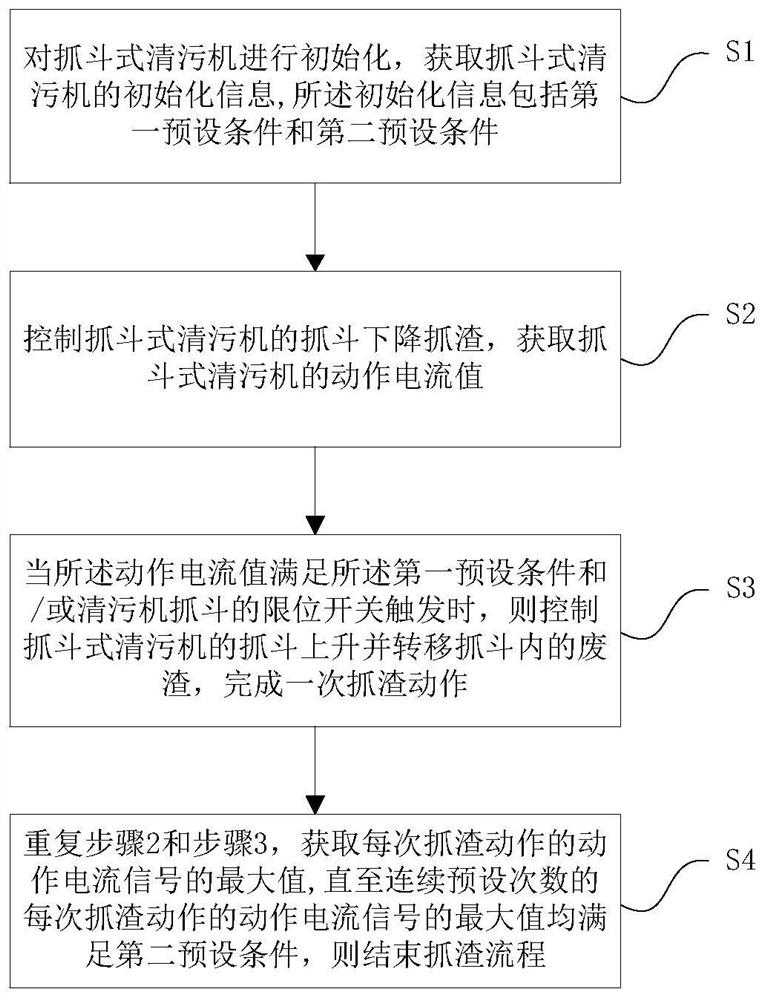
[0061] Such as figure 1 As shown, an automatic control method for a grab-type cleaning machine includes the following steps:
[0062] Step 1: Initialize the grab-type cleaning machine, and obtain the initialization information of the grab-type cleaning machine, and the initialization information includes a first preset condition and a second preset condition;
[0063] Step 2: Control the grab bucket of the grab-type cleaning machine to drop to grab slag, and obtain the action current value Iact of the grab-type cleaning machine;
[0064] Step 3: When the action current value Iact meets the first preset condition and / or the limit switch of the grab of the cleaning machine is triggered, the grab of the grab-type clea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



