

Method and system for estimating human hand posture
A posture estimation and posture technology, applied in the field of image recognition, can solve problems such as difficult to obtain high-precision human posture estimation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
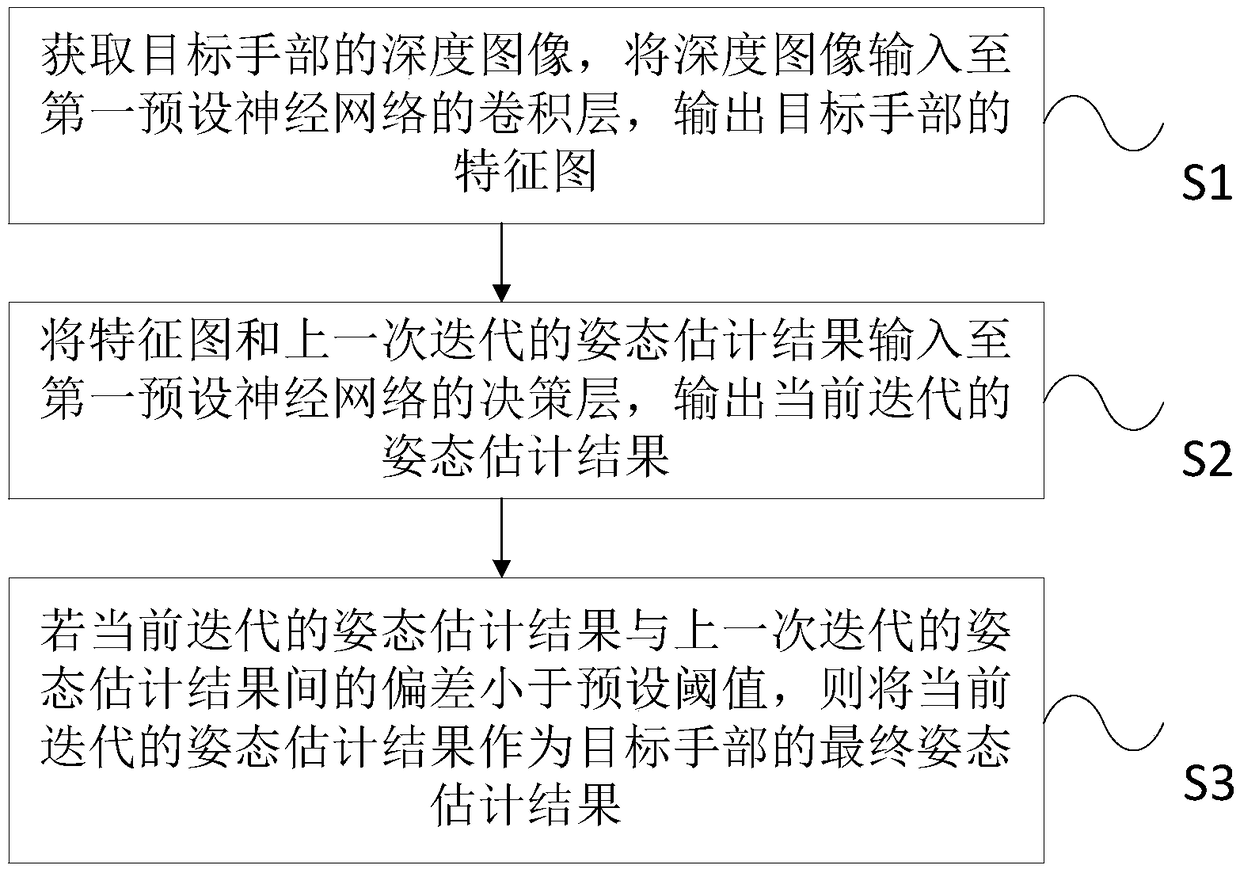
[0044] figure 1 It is a schematic diagram of the overall flow of a human hand pose estimation method according to an embodiment of the present invention, as figure 1 As shown, the present invention provides a method for estimating the posture of a human hand, including:
[0045] S1, acquiring a depth image of the target hand, inputting the depth image to the convolutional layer of the first preset neural network, and outputting a feature map of the target hand;
[0046] Specifically, in this embodiment, the hand that needs pose estimation is taken as the target hand. First, obtain the depth image of the target hand, where the gray value of each pixel in the depth image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More