

Tensioning floating type flexible joint and design method thereof
A technology of flexible joints and design methods, applied in computer-aided design, calculation, special data processing applications, etc., can solve problems such as friction accumulation, affecting robot performance, high cost, etc., to achieve improved stress state, excellent performance, and reduced drive force demand effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] A method for designing a tensioned floating flexible joint. The steps are as follows:
[0028] For a tensioned floating flexible joint, zero stiffness means one degree of freedom, high stiffness means restraint, and low stiffness means pseudo degree of freedom. This stiffness anisotropy can be used to design the degree of freedom of a tensioned floating flexible joint. Specifically, the rotational stiffness should be designed to be much lower than the translational stiffness. Under the same driving torque, the low-rigidity part is easier to produce greater displacement than the high-rigidity part. The greater the difference in stiffness, the greater the difference in motion. There are 6 degrees of freedom in the tensioned floating flexible joint, which are expressed as: x: x translation, y: y translation, z: z translation, Roll, θ: pitch, ψ: yaw;
[0029] 1. Decoupling of degrees of freedom
[0030] When the influence of external force and internal force on stiffness is n...
Embodiment 2
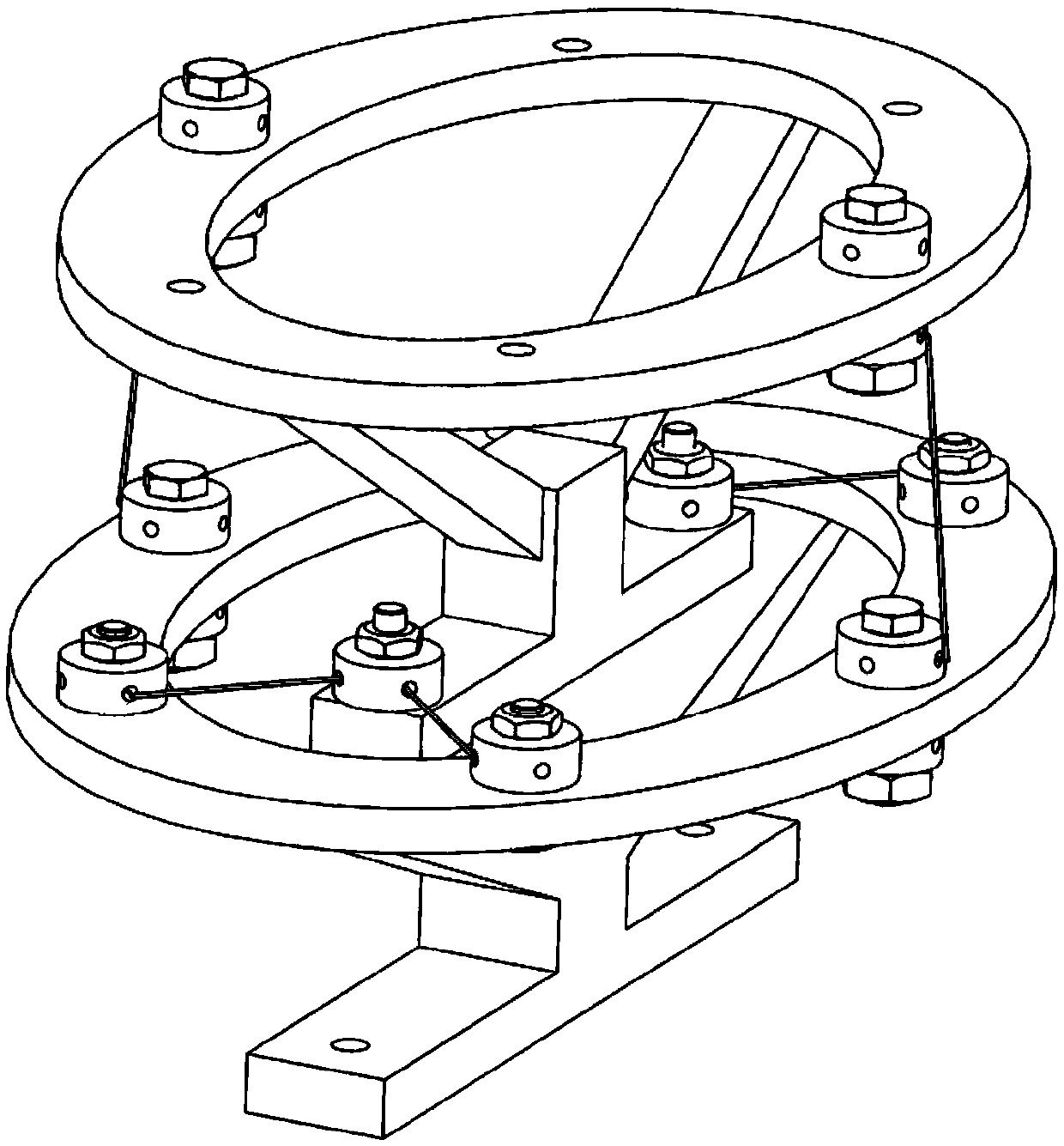
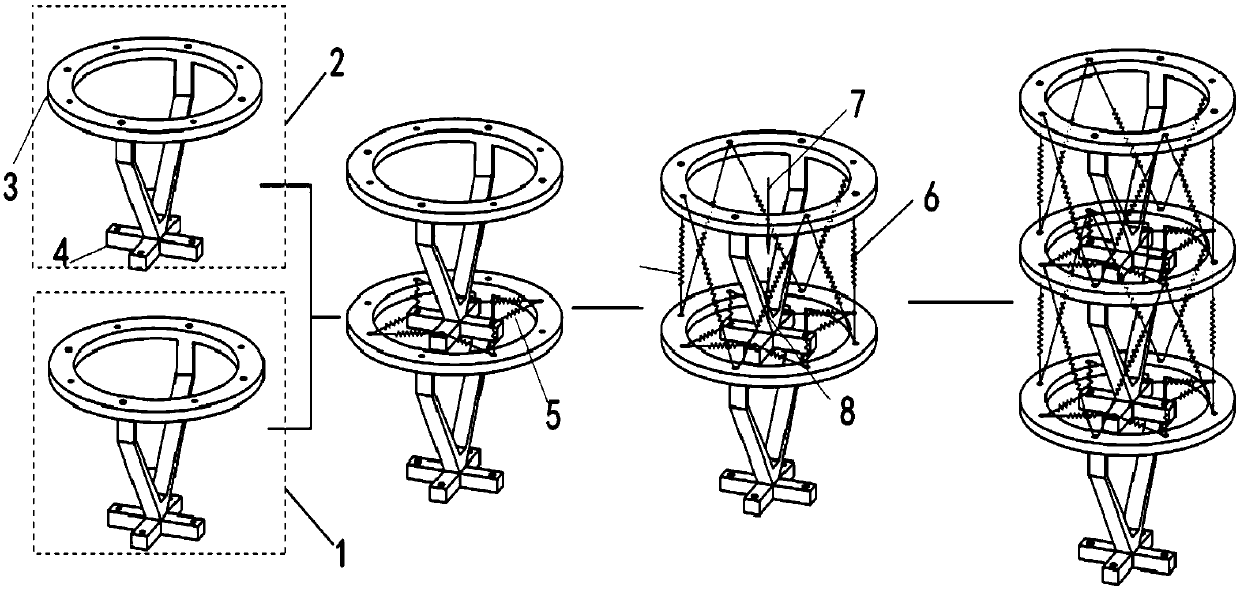
[0041] Such as Figure 1-2 As shown, a tensioned floating flexible joint includes a base platform, a driven platform, and 16 sets of tension elements. The upper structure of the base platform and the lower structure of the driven platform are connected by multiple sets of horizontal tension elements. The upper structure of the platform and the upper structure of the driven platform are connected by multiple sets of axial tension elements, so that the driven platform can be suspended and supported. The multiple sets of axial tension elements provide vertical downward pulling force, and multiple sets of horizontal The tension element provides vertical upward tension to resist, so that the driven platform can float around the base platform without direct mechanical contact. The basic platform and the driven platform are of pan-footed structure. These tension elements are used as outriggers. Springs, pneumatic muscles, shape memory alloys, steel wire ropes or elastic wires can be us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More