

Coordinated trajectory control method, system and equipment based on robot, and storage medium
A trajectory control and space robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as research only considering ideal or simple situations, and achieve the effect of improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
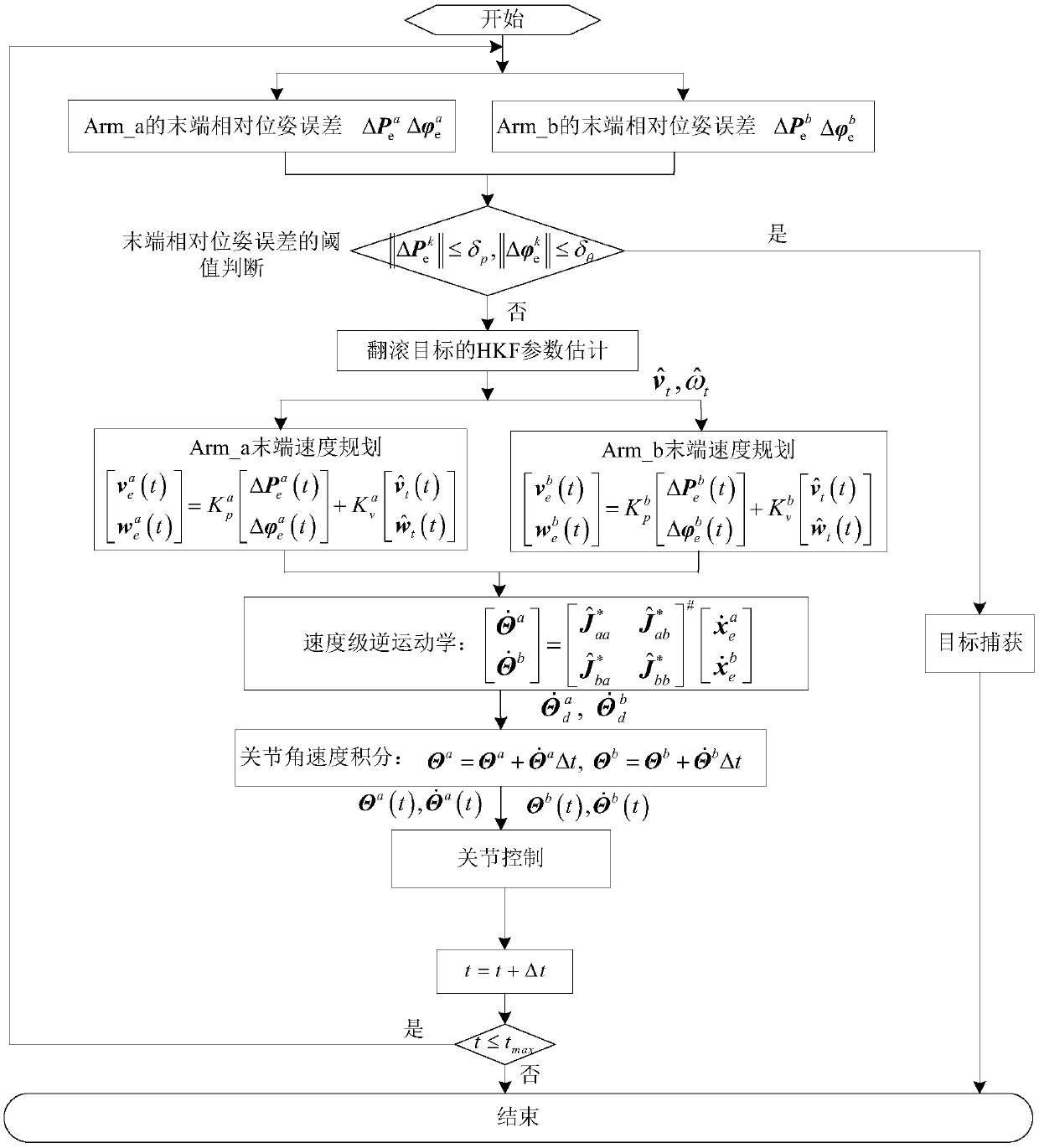
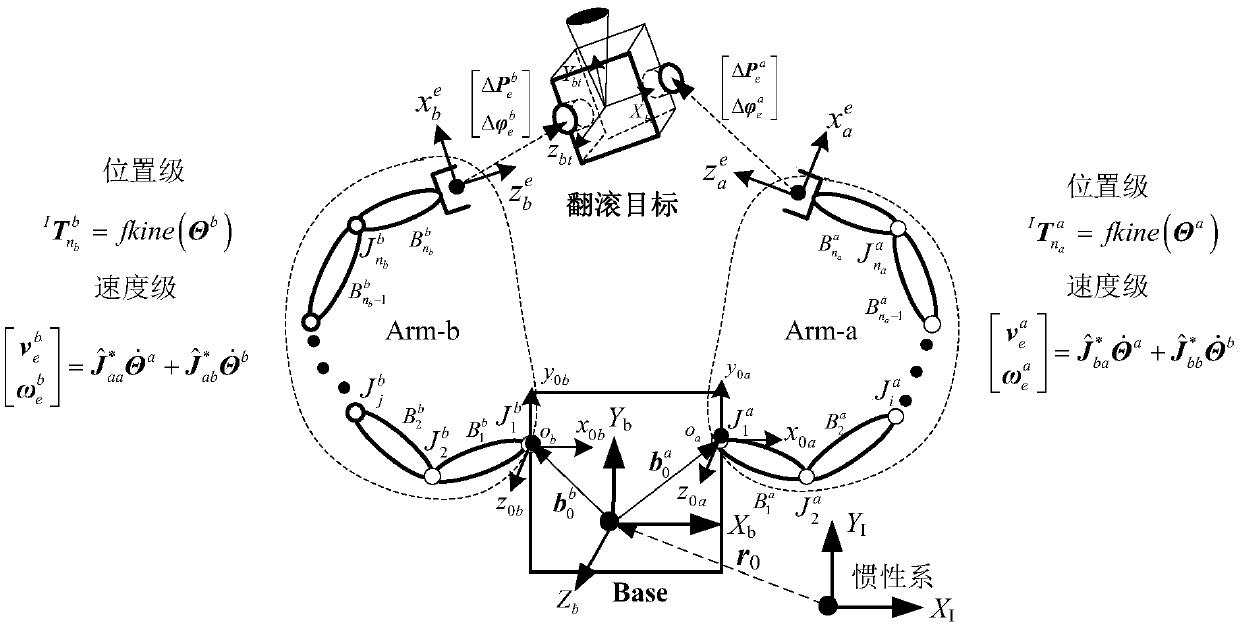
[0050] refer to Figure 1-2 , is a schematic diagram of a coordinated trajectory control method based on a dual-arm space robot according to an embodiment of the present invention.
[0051] A coordinated trajectory control method based on a dual-arm space robot, which includes:
[0052] S1: According to the measurement of the hand-eye camera installed at the end of the arms, the relative pose deviation between the end point and the capture point is obtained respectively as well as
[0053] S2: The relative pose deviation from S1, corresponding to Arm-k, the projection of the end of the manipulator on the capture surface within the catch area and The capture condition is met within the threshold range, and the rolling target can be captured. If the conditions are not met, the trajectory planning c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More