Train velocity curve tracking control method and system based on event triggering PID control
A tracking control and speed curve technology, which is applied in general control systems, control/regulation systems, adaptive control, etc., can solve the problem of reducing the real-time performance and accuracy of control, cannot be applied, and cannot guarantee that the minimum interval between event triggers is greater than or equal to the sensor Lower limit and other issues to achieve the effect of reducing the number of calculations and burden, reducing the failure rate, and improving the service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
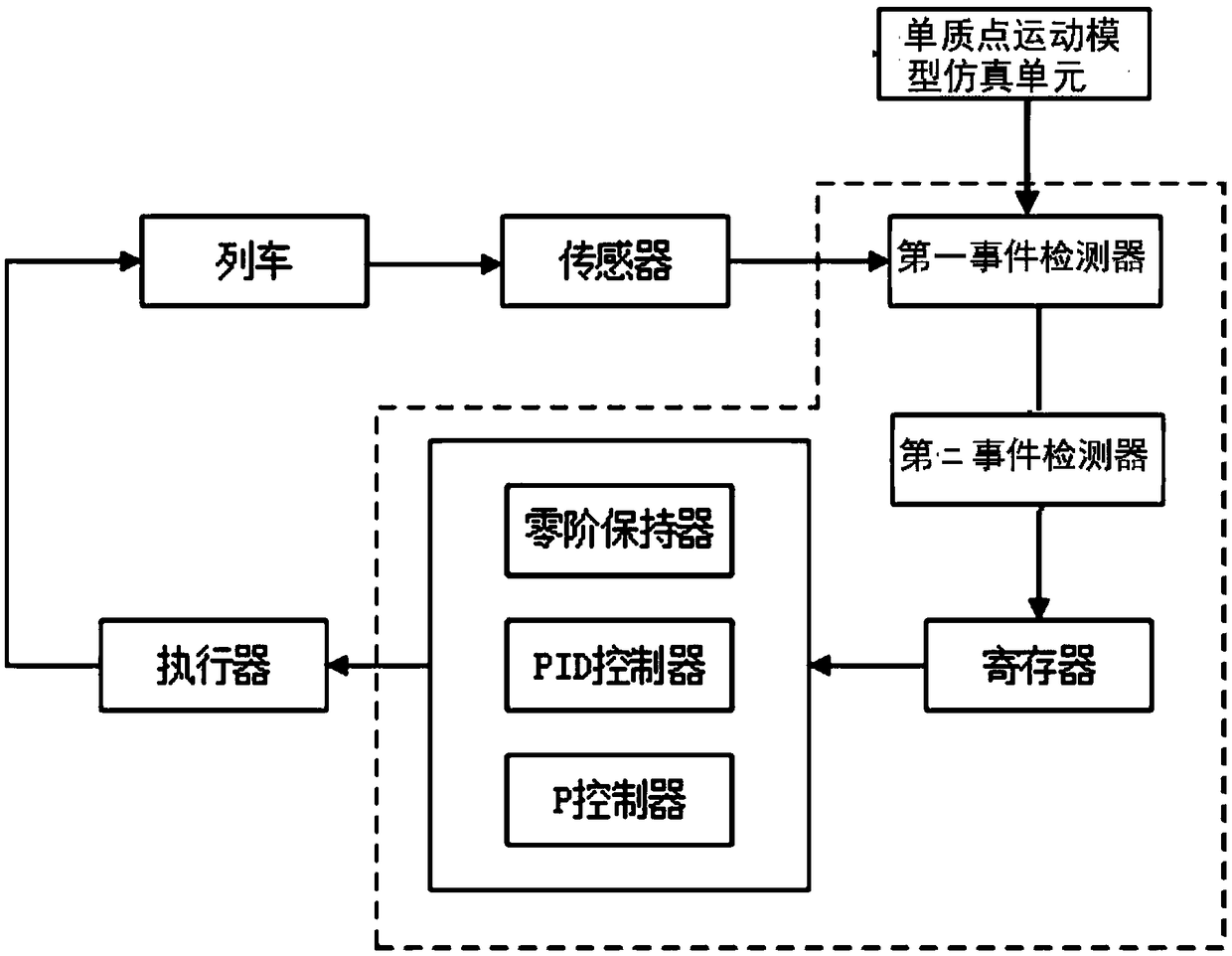
[0058] Such as figure 1 The illustrated embodiment of the present invention provides a train speed curve tracking control system based on event-triggered PID control, the system comprising:
[0059] A single-mass motion model simulation unit is used to establish a single-mass motion simulation model in which the basic resistance is zero when the train starts;
[0060] The sensor group is used to collect the actual running state of the train;
[0061] The first event detector obtains the motion state difference between the actual running state and the expected motion state in the single-mass motion simulation model, and judges whether the motion state difference satisfies the trigger control update condition, and if so, updates the The motion state difference value is sent to the second event detector;
[0062] A second event detector, configured to determine whether to trigger a control state update according to the absolute value of the motion state difference and the rate ...
Embodiment 2
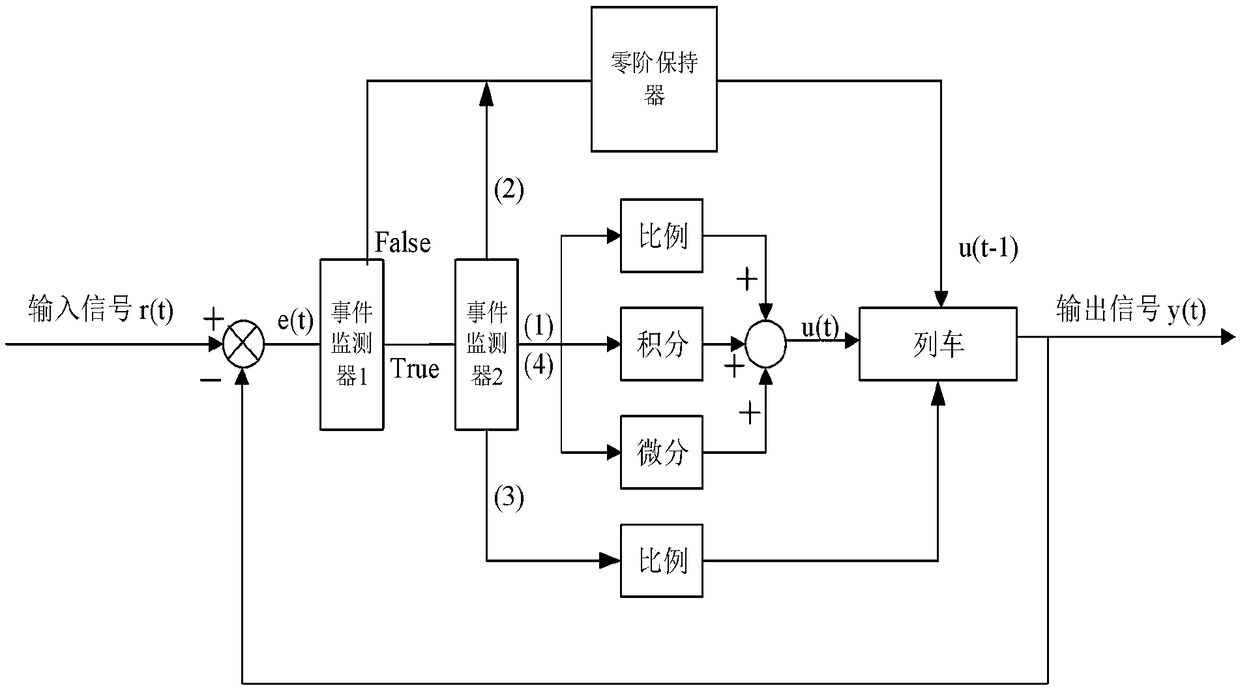
[0080] Such as figure 2 As shown, a kind of train speed curve tracking control method based on time-triggered PID control provided by Embodiment 2 of the present invention includes the following steps:
[0081] Step S110: establishing a single-mass motion simulation model in which the basic resistance is zero when the train starts;
[0082] Step S120: Collect the actual motion state of the train, and obtain the motion state difference according to the expected motion state corresponding to the sampling time point in the single-mass motion simulation model;
[0083] Step S130: Judging whether the motion state difference satisfies the trigger control update condition, if so, proceed to step S130, otherwise, maintain the original control state;
[0084] Step S140: According to the absolute value of the motion state difference and the rate of change of the motion state difference, determine whether to trigger a control state update.
[0085] In the second specific embodiment of...
Embodiment 3
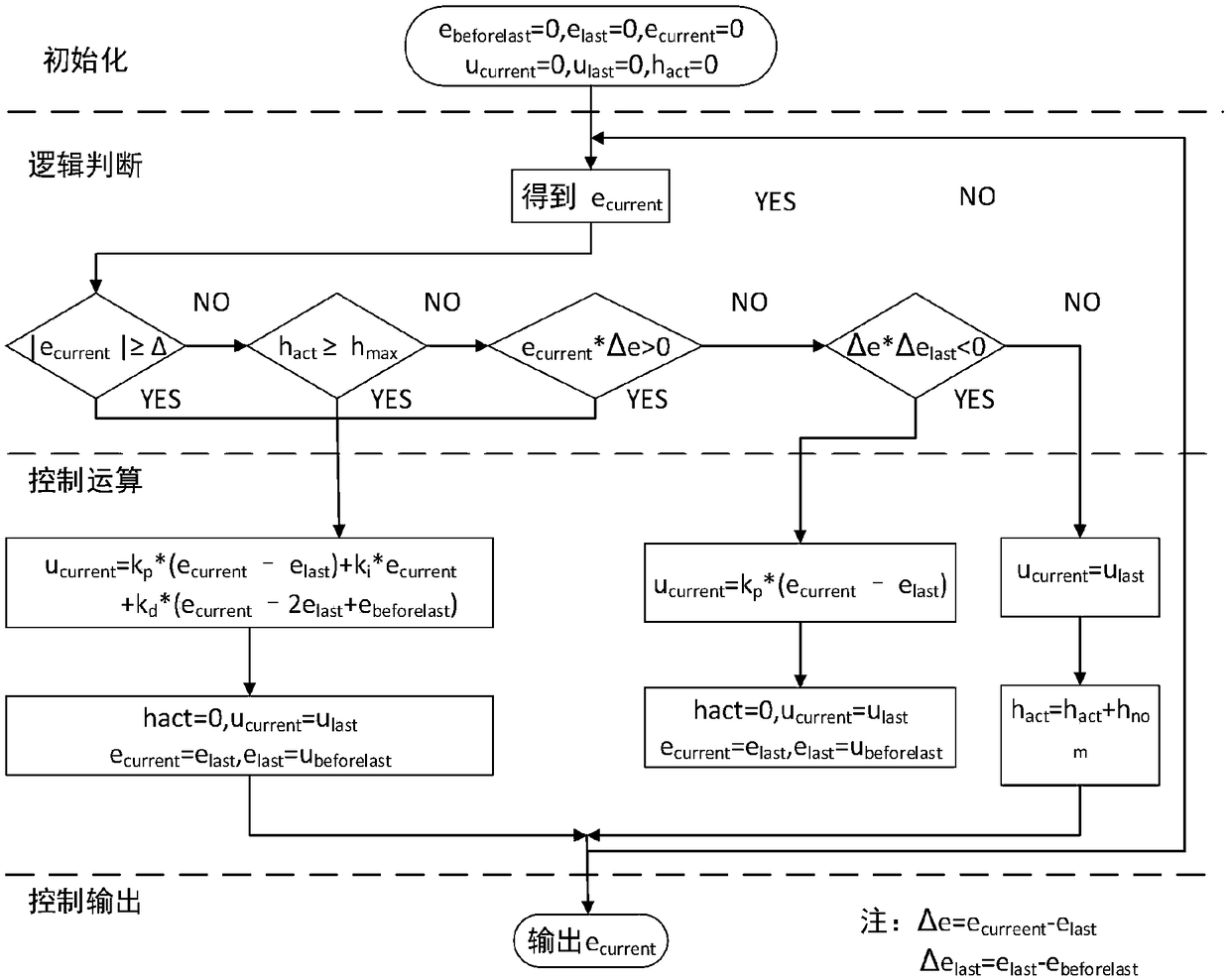
[0106] Such as image 3 As shown, Embodiment 3 of the present invention provides a train speed curve tracking control method based on time-triggered PID control, the method comprising the following steps:
[0107] Step 1: According to the force situation and Newton's second law during the train movement, a time-based single-particle model of the train can be established:
[0108]
[0109] Among them, m is the mass of the train, p(t) and v(t) are the real-time position and speed of the train, u is the traction or braking force of the train, F 0 is the basic resistance of the train, F a is the additional resistance of the train, F s is the additional resistance of the ramp, F c is the additional resistance of the curve, F t is the additional resistance of the tunnel.
[0110] The basic train resistance includes frictional resistance and air resistance. Due to the different types and structures of locomotives and vehicles, and the different operating conditions of locomo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com