

Magnetic bearing vibration moment suppression method based on complex variable finite dimension repetitive control
A vibration torque and repetitive control technology, applied in the direction of electric speed/acceleration control, etc., can solve the problems of the closed-loop system having great influence on stability, unable to use repetitive control, affecting the vibration torque suppression accuracy of the magnetic bearing system, etc., to reduce the parameter design. difficult effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation steps.
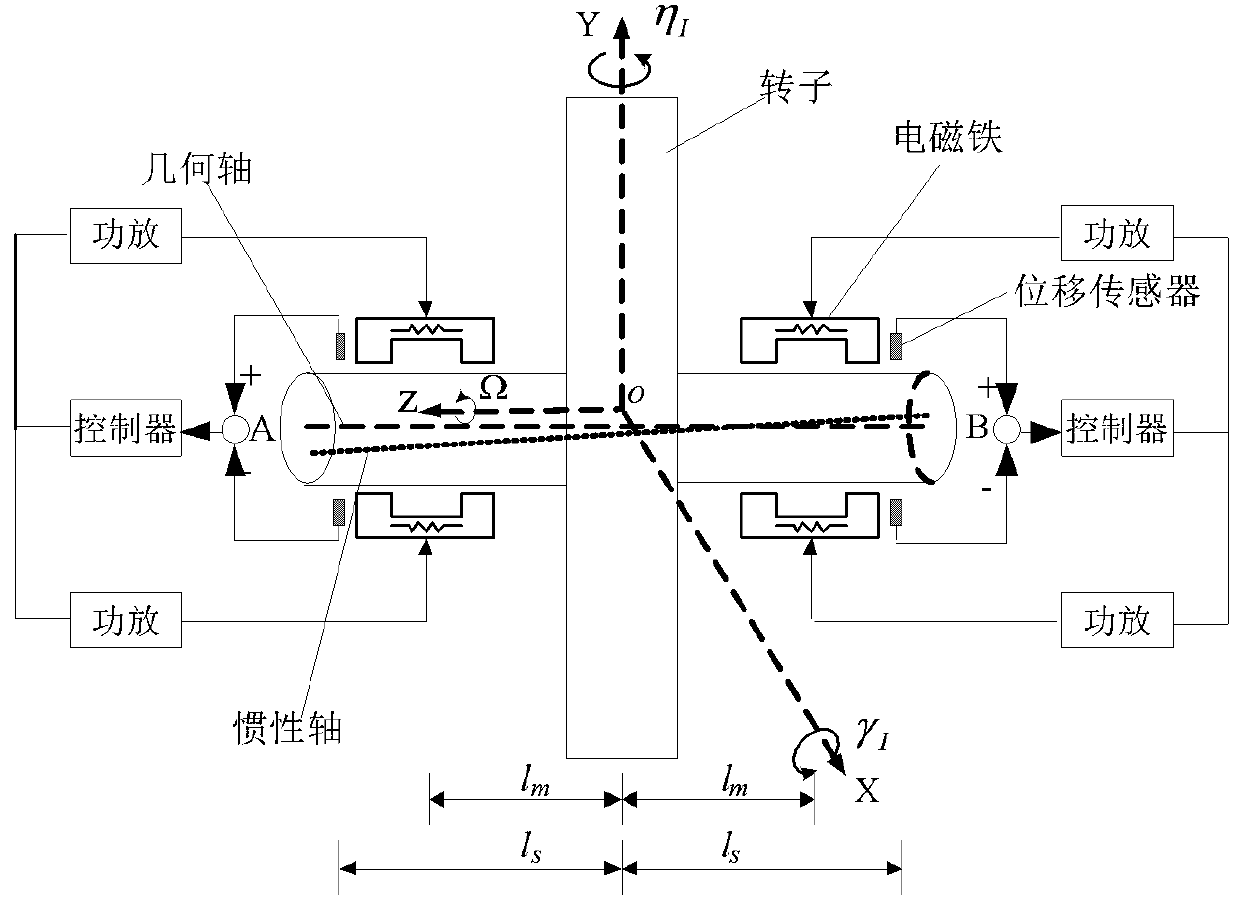
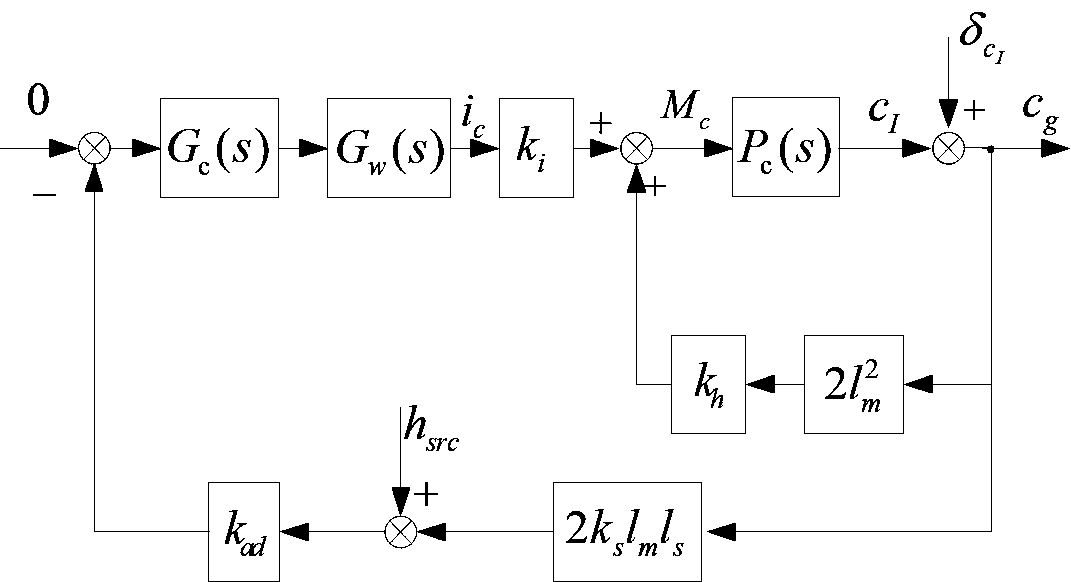
[0042] Such as figure 1 Shown, a kind of magnetic bearing vibration moment suppression method based on complex variable finite-dimensional repeated control of the present invention, its realization process is: at first set up the dynamics model of the magnetic levitation rotor rotation system that includes rotor unbalance and displacement transducer harmonic noise; Then design Magnetic bearing vibration torque suppression algorithm based on parallel complex variable finite-dimensional repetitive control; finally, according to the dual-frequency Bode diagram of the complex variable system function, the parameters of the complex variable finite-dimensional repetitive controller are designed to ensure the stability of the magnetic bearing closed-loop system with strong gyro effect Realize high-precision vibration moment suppression under ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More