

Method for detecting fault of electric propulsion satellite in geostationary orbit and position maintaining method thereof
A technology for geostationary orbit and satellite faults, which is applied in electrical digital data processing, special data processing applications, instruments, etc., and can solve the problems of lack of failure mode position retention scheme, failure to consider thruster fault detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
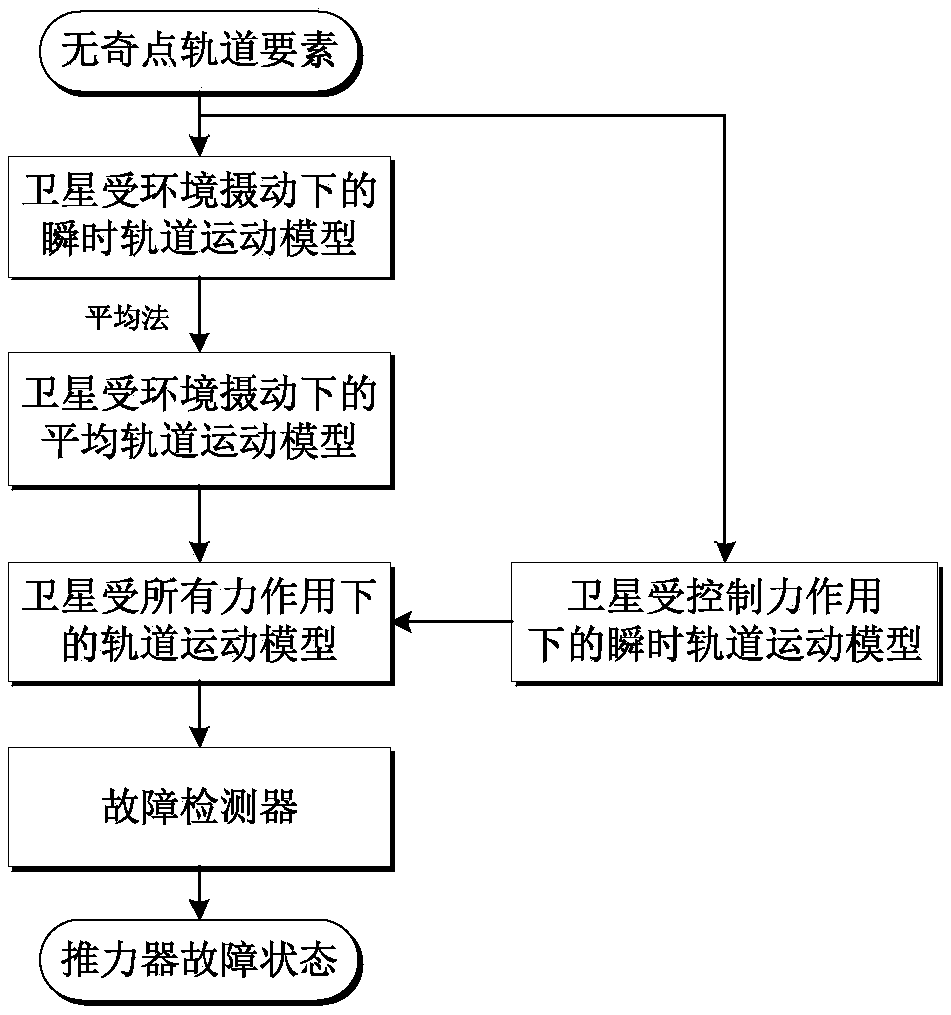
[0187] Such as figure 1 As shown, this embodiment discloses a fault detection method for geostationary electric propulsion satellites. In order to verify the method, firstly, a satellite operating in geostationary orbit is selected as the main research object. The start time of the simulation is 0:00:00 (Universal Time) on January 1, 2020. The basic parameters of the satellite are shown in the table below.
[0188] Table 1 Satellite parameters
[0189]
[0190]
[0191] Step 1: Establish the instantaneous orbital motion model of the geostationary satellite under environmental perturbation through the Lagrange planetary motion equation, and the environmental perturbation includes the earth's non-spherical perturbation R ENP , sun and moon gravitational perturbation R LSP , solar light pressure perturbation R SRP . ;
[0192] When classical orbital elements describe the orbital motion of GEO satellites with small inclination and small eccentricity, singularity problem...
Embodiment 2
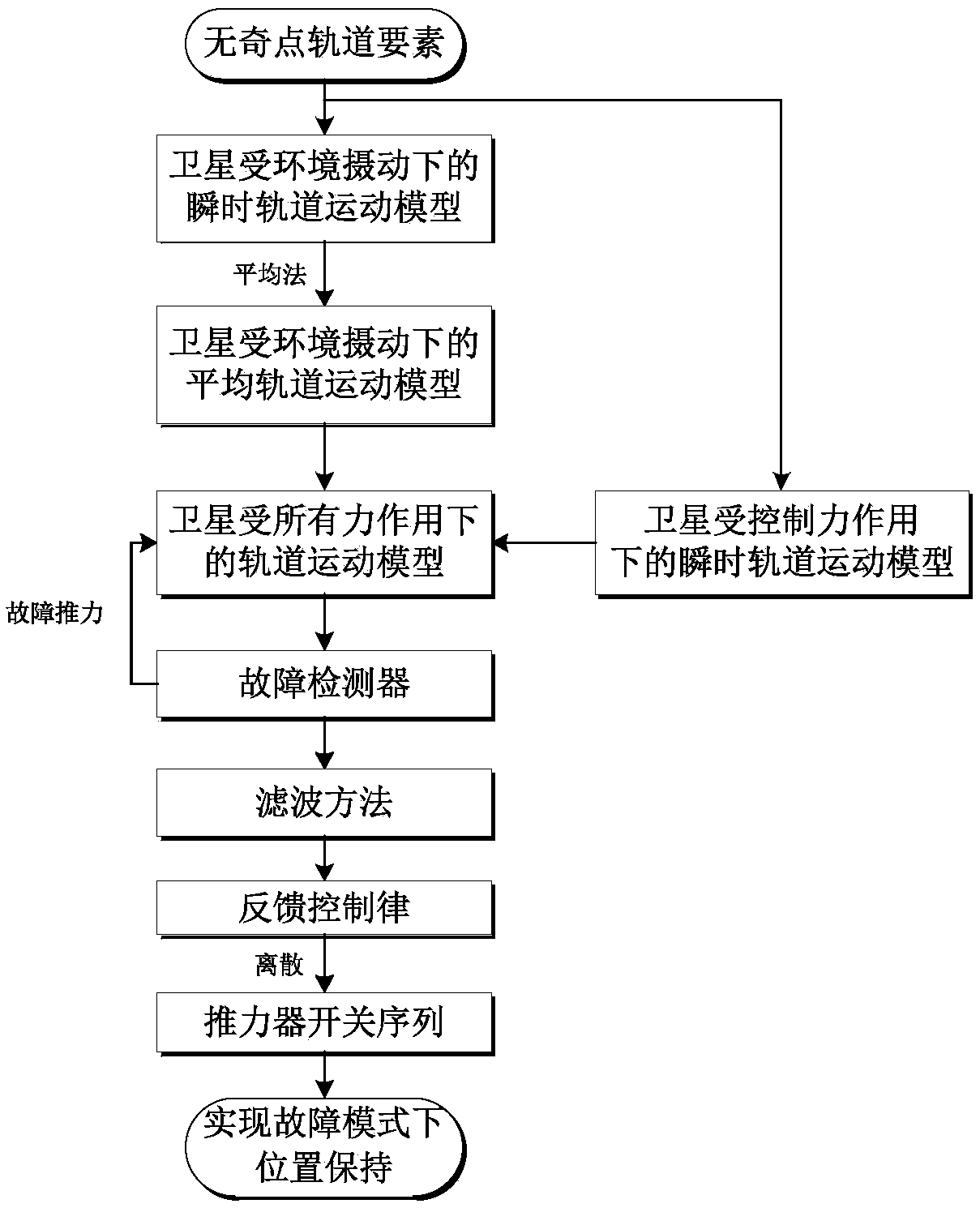
[0224] Such as figure 2 As shown, on the basis of the fault detection method of a geostationary orbit electric propulsion satellite, this embodiment also discloses a position keeping method of a geostationary orbit electric propulsion satellite failure mode, including the geostationary orbit electric propulsion satellite The steps one to five of the satellite failure detection method also include steps six to nine. For verifying the method, the parameters selected in the first five steps are consistent with embodiment 1, and steps six to nine are as follows:
[0225] Step 6: Calculate the orbit drift caused by thruster failure by filtering method;
[0226] As a preference, the filtering method described in step 6 is preferably an unscented Kalman filtering method, and the specific implementation methods of the steps are shown in formulas (39)-(43).
[0227] In this example, the initial value of the state covariance matrix is set as shown in formula (59):
[0228] P=diag(1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More