

Networked control system and scheduling method for multi-axis distributed drive electric vehicles
A technology of networked control and electric vehicles, which is applied in the field of networked control systems and dispatching of multi-axis distributed drive electric vehicles, can solve the problems of large random delays and confusion in information transmission, and achieve improved power performance and safety, and improved The effect of real-time and guaranteed synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
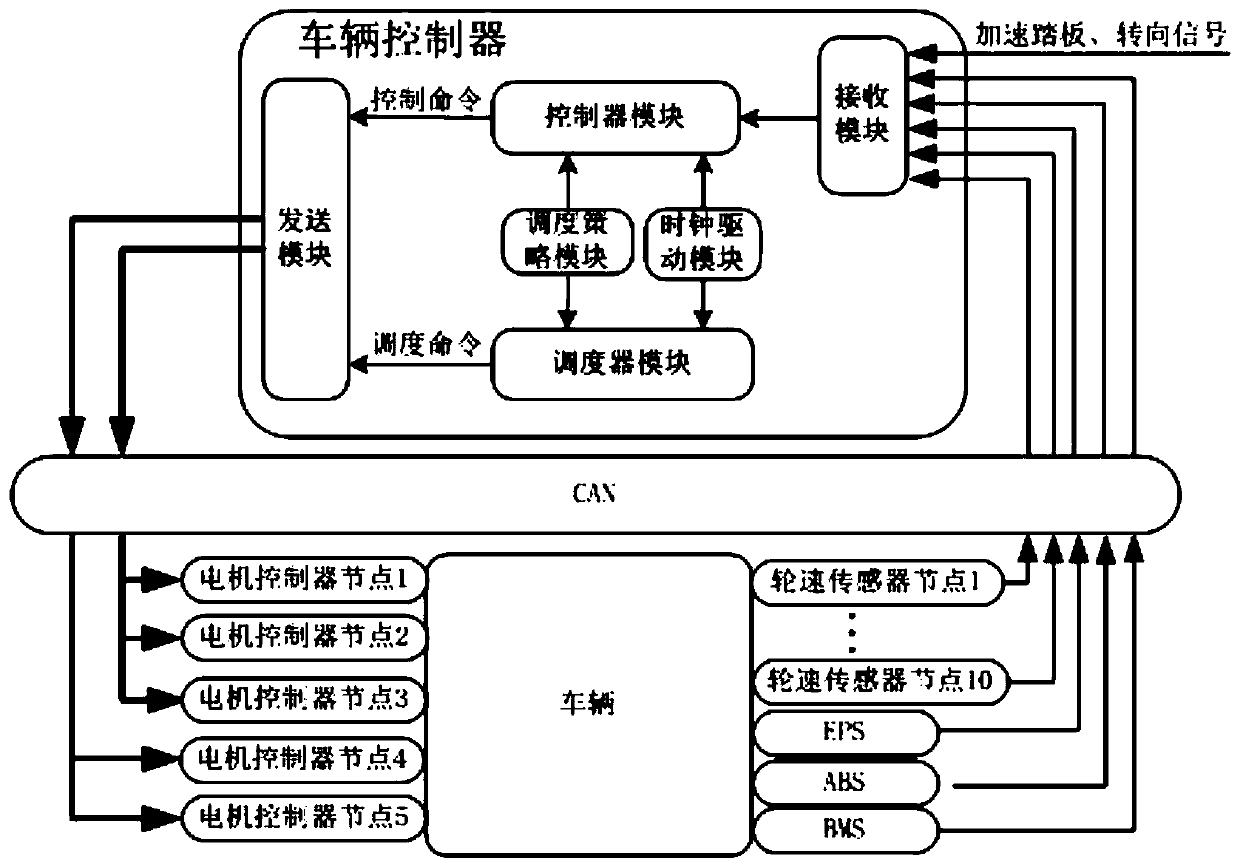
[0026] Such as figure 1 As shown, the networked control system of a multi-axis distributed drive electric vehicle includes a vehicle controller, a plurality of drive motor controllers, and a plurality of sensor nodes (such as each wheel speed sensor node included in each MCU, included in the EPS Steering angle sensor node, the brake pedal sensor node included in the ABS and the power sensor node included in the BMS, etc.); the vehicle controller includes a receiving module, a controller module, a scheduler module, a clock drive module, and a scheduling strategy module and sending module.
[0027] The input end of the receiving module is connected with each sensor node of the vehicle through the CAN protocol network, and receives the driver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More