

A Position Sensorless Control Method for Permanent Magnet Synchronous Motor Based on Smooth Nonsingular Terminal Sliding Mode Observer
A technology of permanent magnet synchronous motor and non-singular terminal, which is applied in motor control, electronically commutated motor control, control system, etc. It can solve the problems of phase lag and inability to accurately obtain the position and speed of the motor rotor, and improve the observation accuracy , the effect of accurate back EMF
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
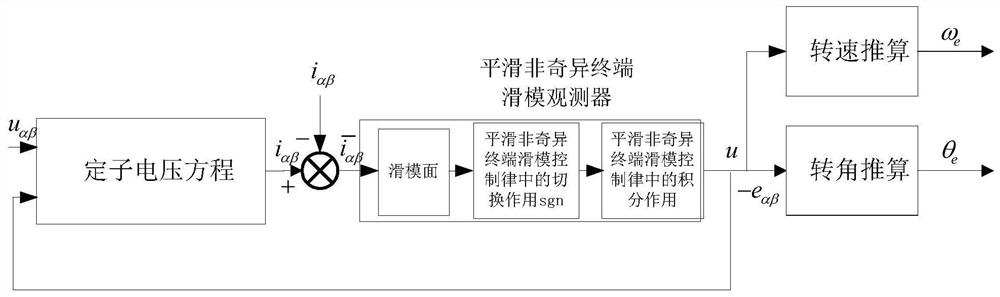
[0028] Specific implementation mode one: refer to figure 1 Specifically illustrate this embodiment, the permanent magnet synchronous motor position sensorless control method based on a smooth non-singular terminal sliding mode observer described in this embodiment, the method includes the following steps:
[0029] Step 1. In the αβ-axis coordinate system, a smooth non-singular terminal sliding mode observer is used to track the stator current of the permanent magnet synchronous motor to obtain the stator current deviation;
[0030] Step 2. The stator current deviation is in the state of continuous sliding mode motion. The stator current deviation is processed by the sliding mode surface, and then through the switching action and integral action in the smooth non-singular terminal sliding mode control law, so as to obtain the non-high-frequency switching output vector u, according to which output vector u obtains back electromotive force;
[0031] Step 3: Obtain the rotationa...
specific Embodiment approach 2
[0034] Specific embodiment two: This embodiment is a further description of the permanent magnet synchronous motor position sensorless control method based on a smooth non-singular terminal sliding mode observer described in specific embodiment one. In this embodiment, in step one, use The smooth non-singular terminal sliding mode observer tracks the stator current of the permanent magnet synchronous motor, and the process of obtaining the stator current deviation is:
[0035] In the αβ-axis coordinate system, the stator voltage equation of the permanent magnet synchronous motor is:
[0036]
[0037] where u α , u β are the stator voltage in the αβ coordinate system; i α , i β are the stator currents in the αβ coordinate system; L and R s are the winding equivalent inductance and resistance respectively; e α , e β Respectively, the counter electromotive force in the αβ coordinate system is expressed as:
[0038]
[0039] ω e is the electrical angular velocity of th...
specific Embodiment approach 3
[0049] Specific embodiment three: This embodiment is a further description of the permanent magnet synchronous motor position sensorless control method based on a smooth non-singular terminal sliding mode observer described in specific embodiment two. In this embodiment, in step two, the stator When the current deviation is in the state of continuous sliding mode motion, the stator current deviation is processed by the sliding mode surface, and then through the switching action and integral action in the smooth non-singular terminal sliding mode control law, so as to obtain the output vector u without high frequency switching The process is:
[0050] According to Equation 6, the smooth non-singular terminal sliding mode surface is set as:
[0051]
[0052] Set the smooth non-singular terminal sliding mode control law u as:
[0053] u=u eq + u n Formula 8,
[0054] Among them, u eq is the equivalent control component, u n To switch control components,
[0055] Based ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More