

UAV group cooperation system and operating method thereof
A collaborative system and unmanned aerial vehicle technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the time-consuming and labor-intensive problems of material replenishment, achieve high operating efficiency, save operating costs, high work efficiency and work The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
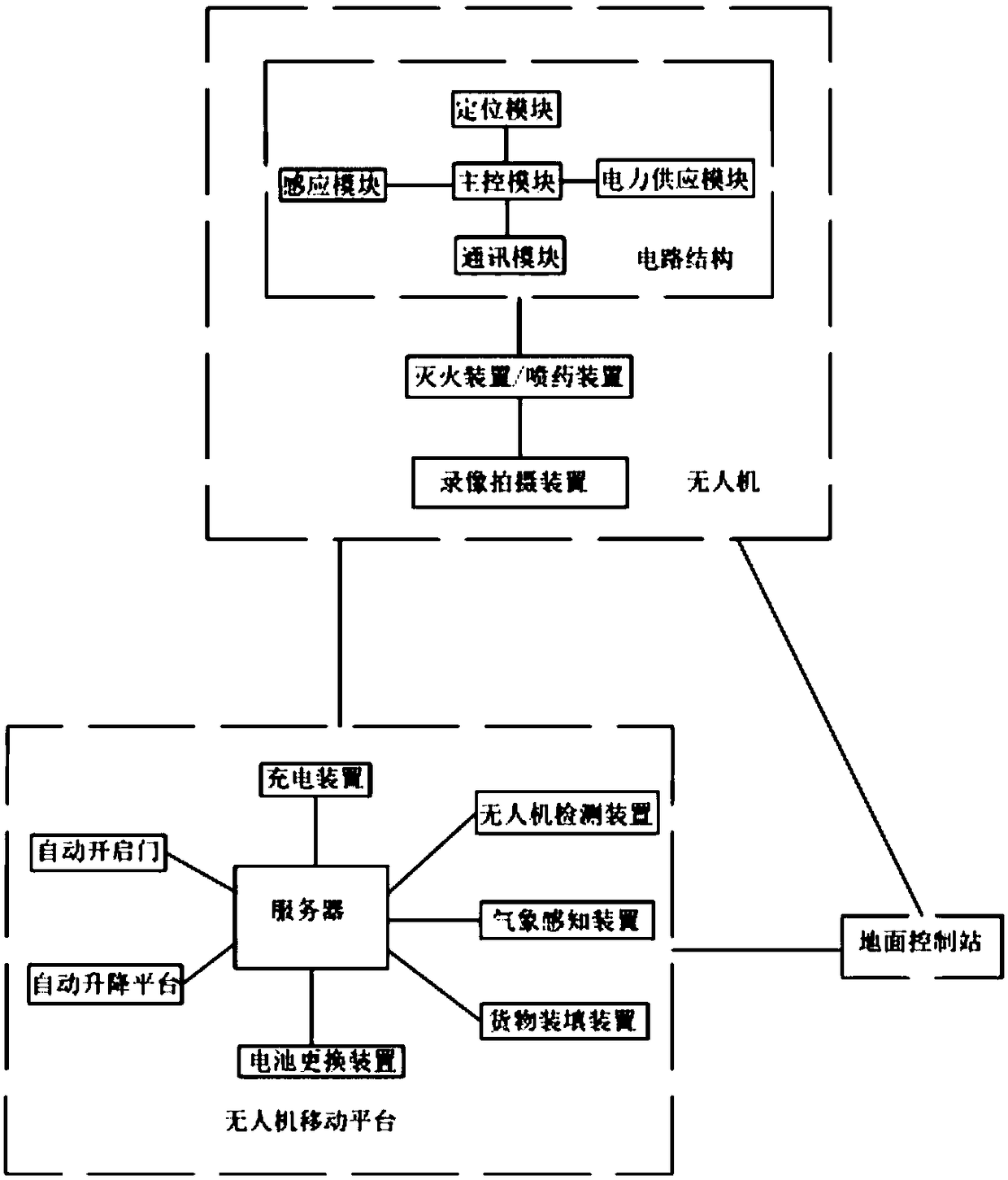
[0027] An unmanned aerial vehicle swarm cooperation system includes multiple unmanned aerial vehicles, unmanned aerial vehicle mobile platforms and ground control stations. The circuit structure of unmanned aerial vehicles includes a main control module, a positioning module, a sensing module, a communication module and a power supply module. module, sensing module, communication module and power supply module are all connected to the main control module, the main control module can use but not limited to embedded processors to control the overall function of the UAV; the positioning module can Accurate positioning of the position, so as to facilitate the division of labor and cooperation of the UAV and the smooth return to the UAV platform for power and material replenishment; the sensing module is mainly used to sense the obstacles in the UAV operation area and the position of adjacent UAVs, so as to facilitate Avoidance and sub-area operations; the communication module is us...
Embodiment 2
[0035] An operation method of an unmanned aerial vehicle group cooperation system, comprising the following steps,
[0036] Step a, the UAV mobile platform carries multiple UAVs and moves to the vicinity of the operation area, and can automatically load the UAVs during the transportation process;
[0037] Step b. The UAV mobile platform plans the UAV operation route and operation area, the automatic opening door of the UAV mobile platform is opened, the UAV takes off automatically, and the sensing module senses the position of each UAV. UAVs operate in a fixed area;
[0038] Step c. The ground control station is connected to the UAV communication module. After obtaining the detailed location information of the UAV mobile platform, the ground control station transmits the position of the UAV mobile platform to the UAV. The machine flies to the UAV mobile platform according to the coordinates of the UAV mobile platform, and the UAV to be supplemented with electricity or goods f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More