

A quick changing device for a surgical instrument
A technology of surgical instruments and control devices, applied in the field of medical instruments, can solve the problems of cumbersome locking operation process, inconvenient surgical operation, and difficult implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
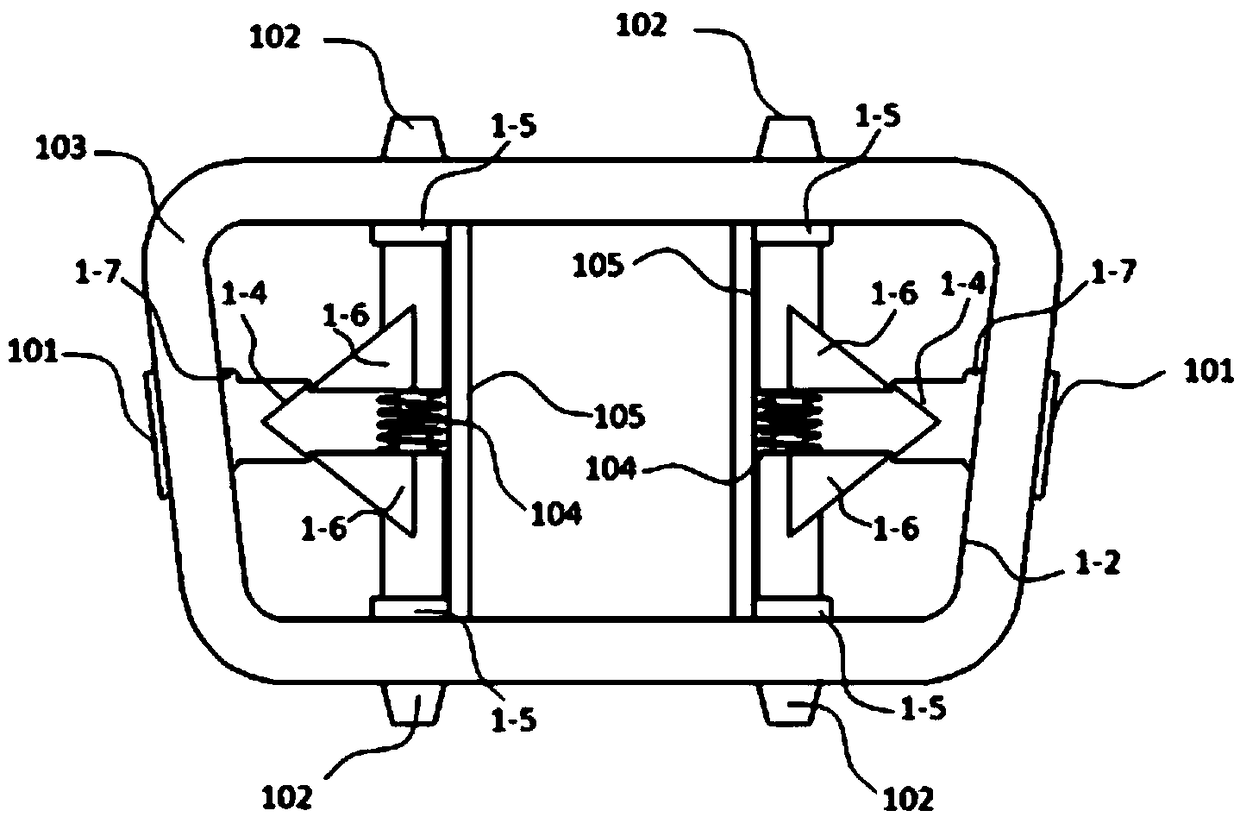
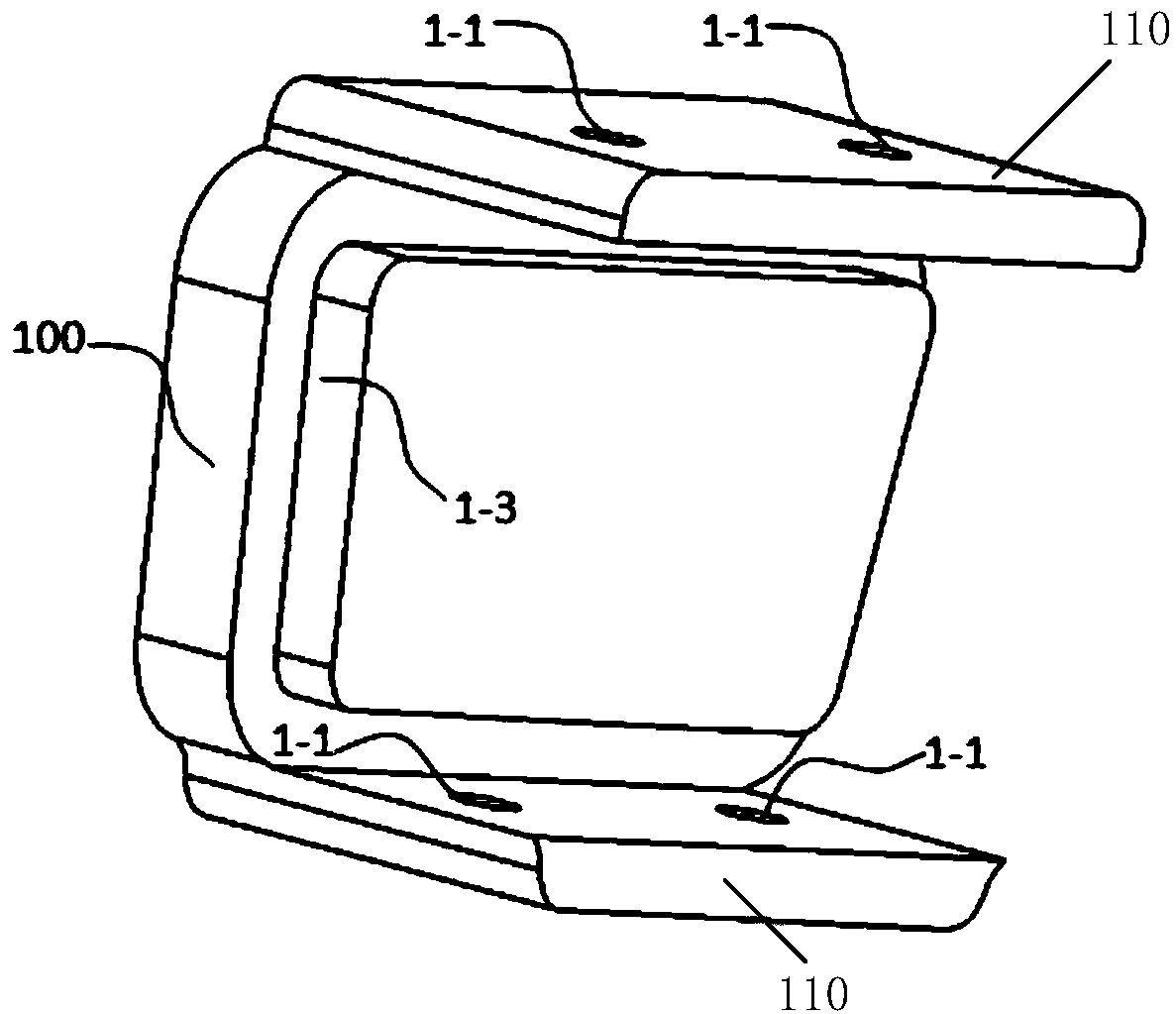
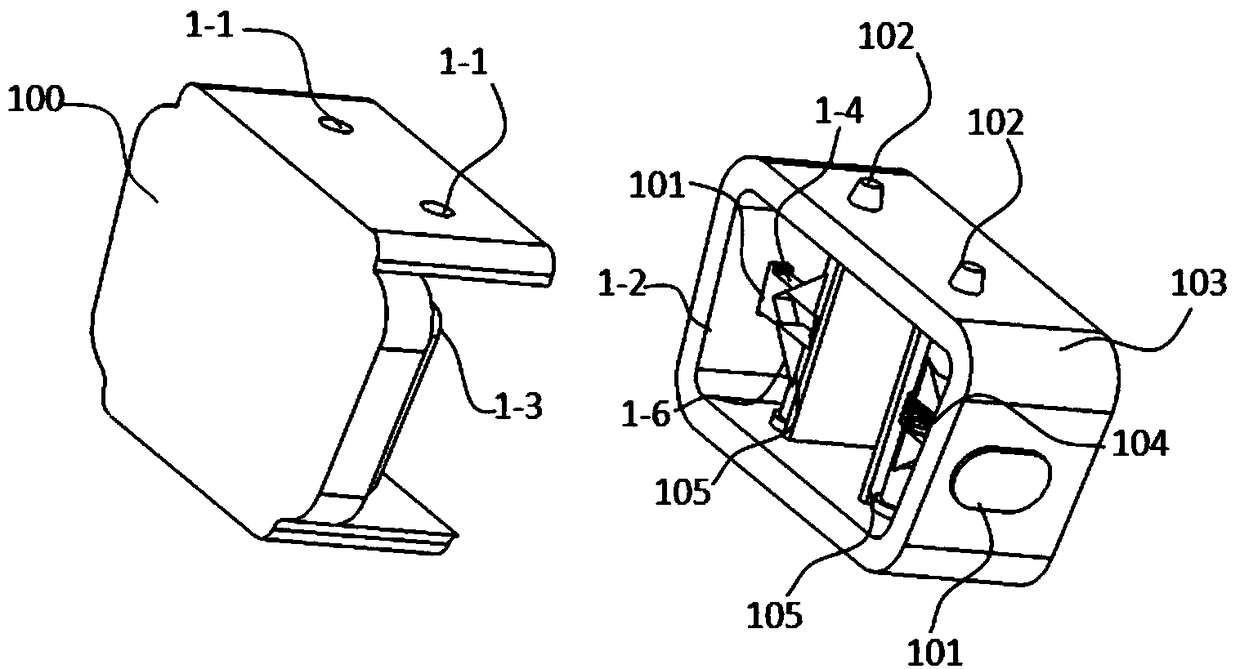
[0137] Please refer to Figure 1 to Figure 7 , figure 1 It is a structural schematic diagram of the installation base and its upper locking mechanism provided by Embodiment 1 of the present invention, figure 2 It is a schematic structural diagram of the installation joint provided by Embodiment 1 of the present invention, image 3 It is a schematic diagram of the state where the installation base and the installation joint are separated from each other provided by Embodiment 1 of the present invention, Figure 4 It is a schematic diagram of the mutual fixing state of the installation base and the installation joint provided by Embodiment 1 of the present invention, Figure 5 It is a schematic diagram of the use state of the installation base and its upper locking mechanism provided by Embodiment 1 of the present invention, Image 6 It is a schematic structural diagram of the locking pin provided in Embodiment 1 of the present invention, Figure 7 It is a structural schema...
Embodiment 2
[0155] Please refer to Figure 8 to Figure 15 , Figure 8 It is a schematic diagram of the state where the installation joint and the installation base are separated from each other provided by the second embodiment of the present invention, Figure 9 It is a schematic cross-sectional view of the separation of the installation base and the installation joint provided by the second embodiment of the present invention, Figure 10 It is a schematic diagram of the assembly and connection process of the installation base and the installation joint provided by the second embodiment of the present invention, Figure 11 It is a schematic diagram of the mutual locking state of the installation base and the installation joint provided by the second embodiment of the present invention, Figure 12 It is a schematic diagram of the appearance state of the mutual locking of the installation base and the installation joint provided by the second embodiment of the present invention, Figure...
Embodiment 3
[0173] Please refer to Figure 16 to Figure 19 , Figure 16 It is a structural schematic diagram of the installation base and its upper locking mechanism provided by the third embodiment of the present invention, Figure 17 It is a schematic structural diagram of the installation joint provided by Embodiment 3 of the present invention, Figure 18 It is a schematic diagram of the state where the installation base and the installation joint are separated from each other provided by the third embodiment of the present invention, Figure 19 It is a schematic diagram of a state in which the installation base and the installation joint are fixed to each other provided by the third embodiment of the present invention.
[0174] Such as Figure 16 to Figure 19 As shown, the quick change device includes a mounting base 202, a mounting joint 201, a positioning mechanism and a locking mechanism. The installation joint 201 is inserted on the installation base 202 and the two are positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More