

A portable finger and wrist rehabilitation robot
A rehabilitation robot and portable technology, applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc., can solve the problem of inability to realize active training and resistance training in rehabilitation training, and inability to realize radial deviation of fingers, wrist, wrist, ulnar deviation and wrist flexion Stretching exercises, no force sensors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088]The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
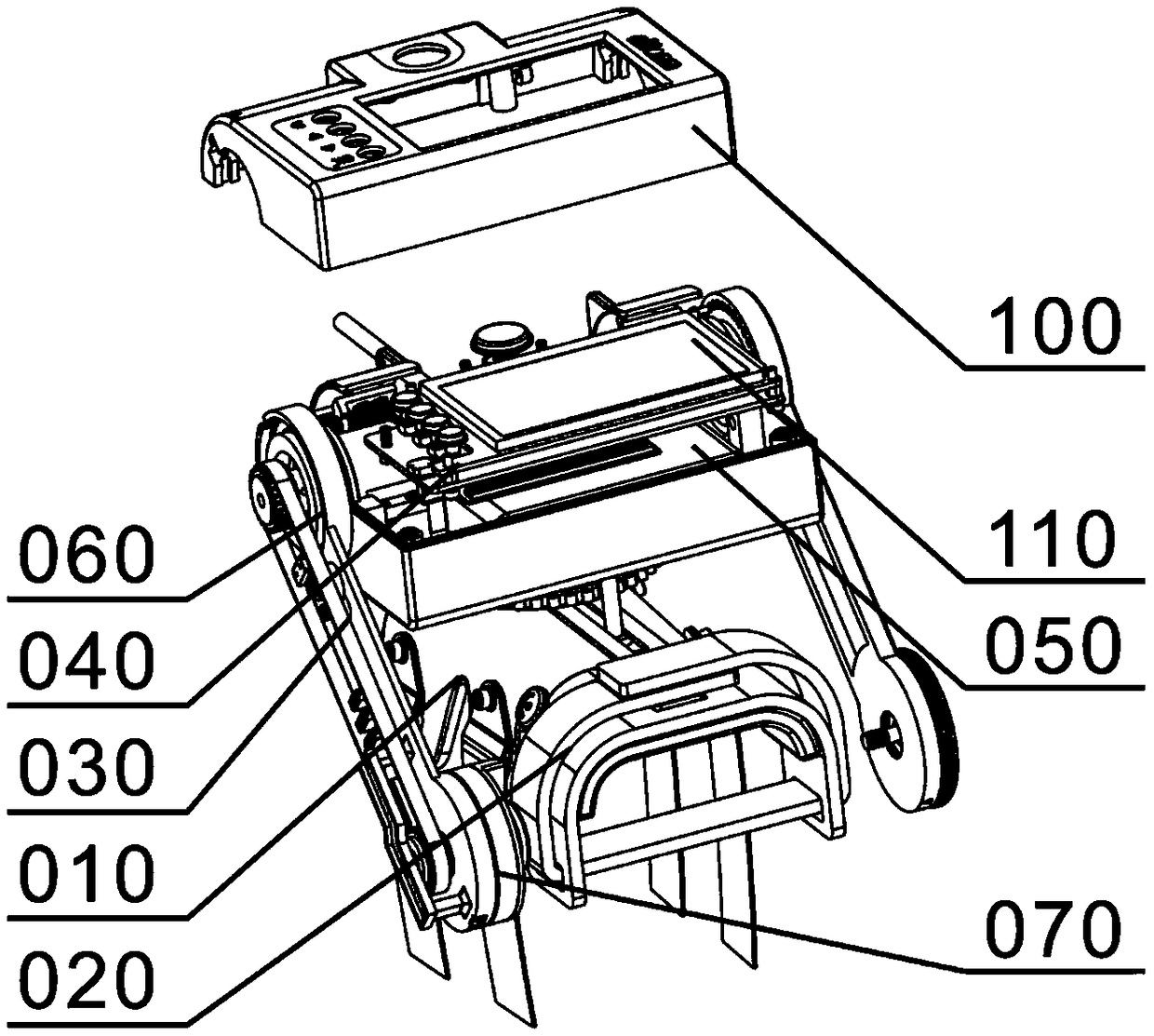
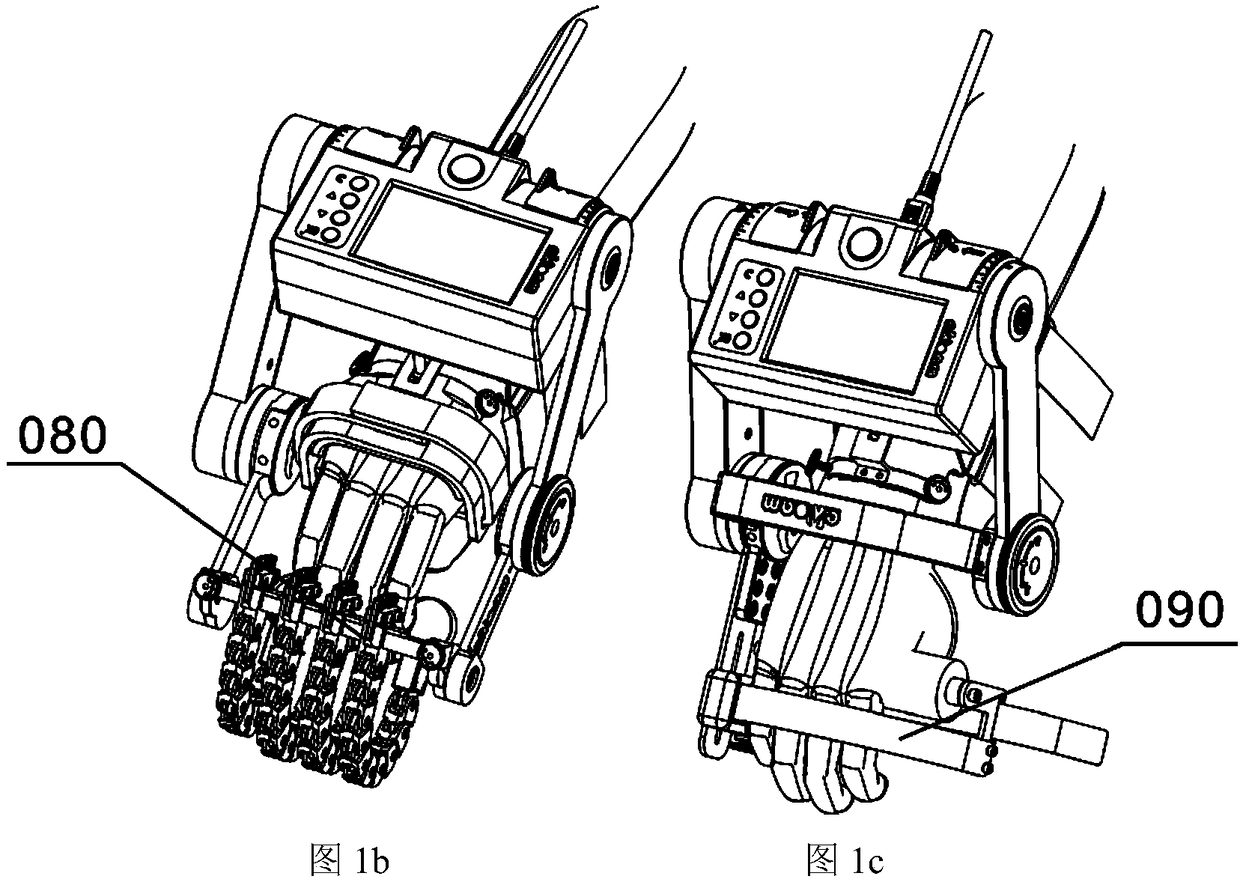
[0089] Such as Figure 1a , Figure 1b , Figure 1c As shown, a schematic diagram of a preferred embodiment of a portable finger-wrist rehabilitation robot, including: arm sheath 010, palm sheath 020, motion transmission part 030, motion control part 040, power supply part 050, rotating rocker part 060, terminal interface Part 070, finger rehabilitation training part 080, wrist rehabilitation training part 090, shell 100, human-computer interaction part 110, wherein:
[0090] The arm sheath 010 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More