

Unmanned surface vehicle ship-borne speed measurement and direction measurement method based on UWB (Ultra-wide Bandwidth) indoor positioning
An indoor positioning and unmanned boat technology, which is applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
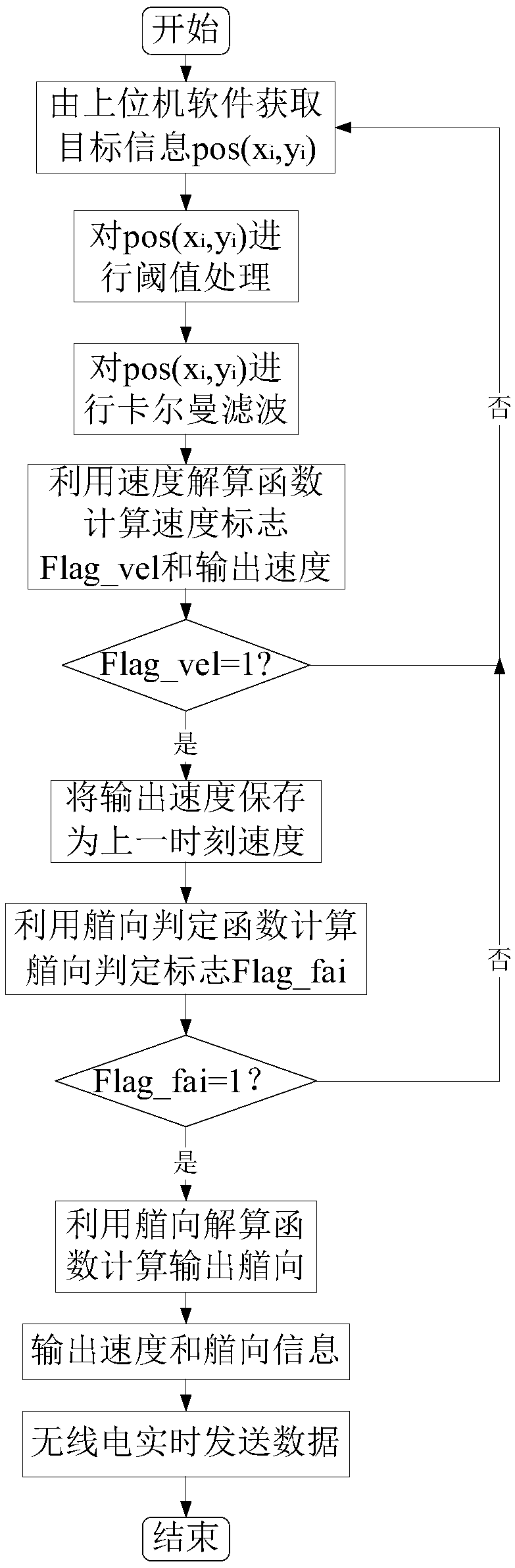
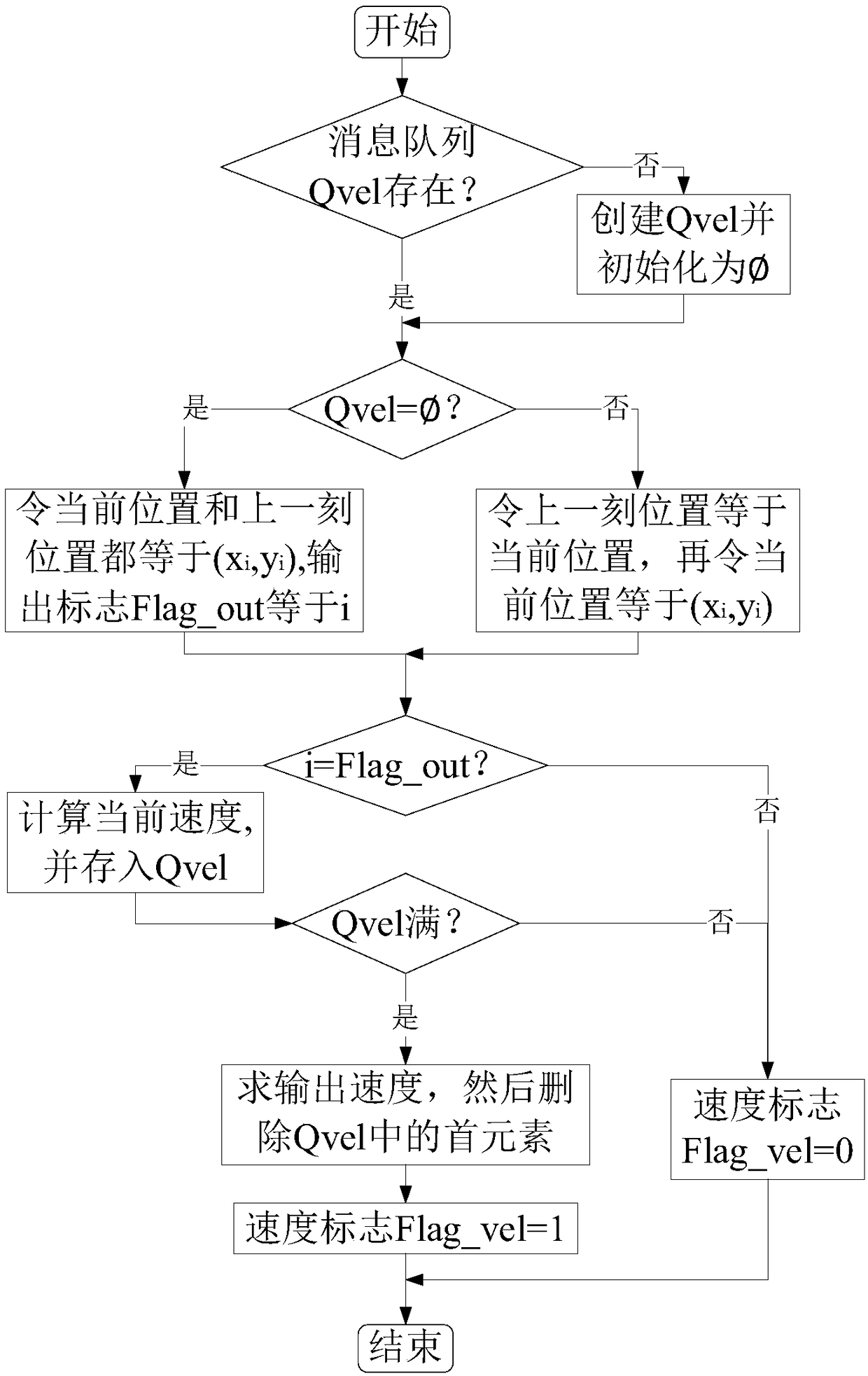
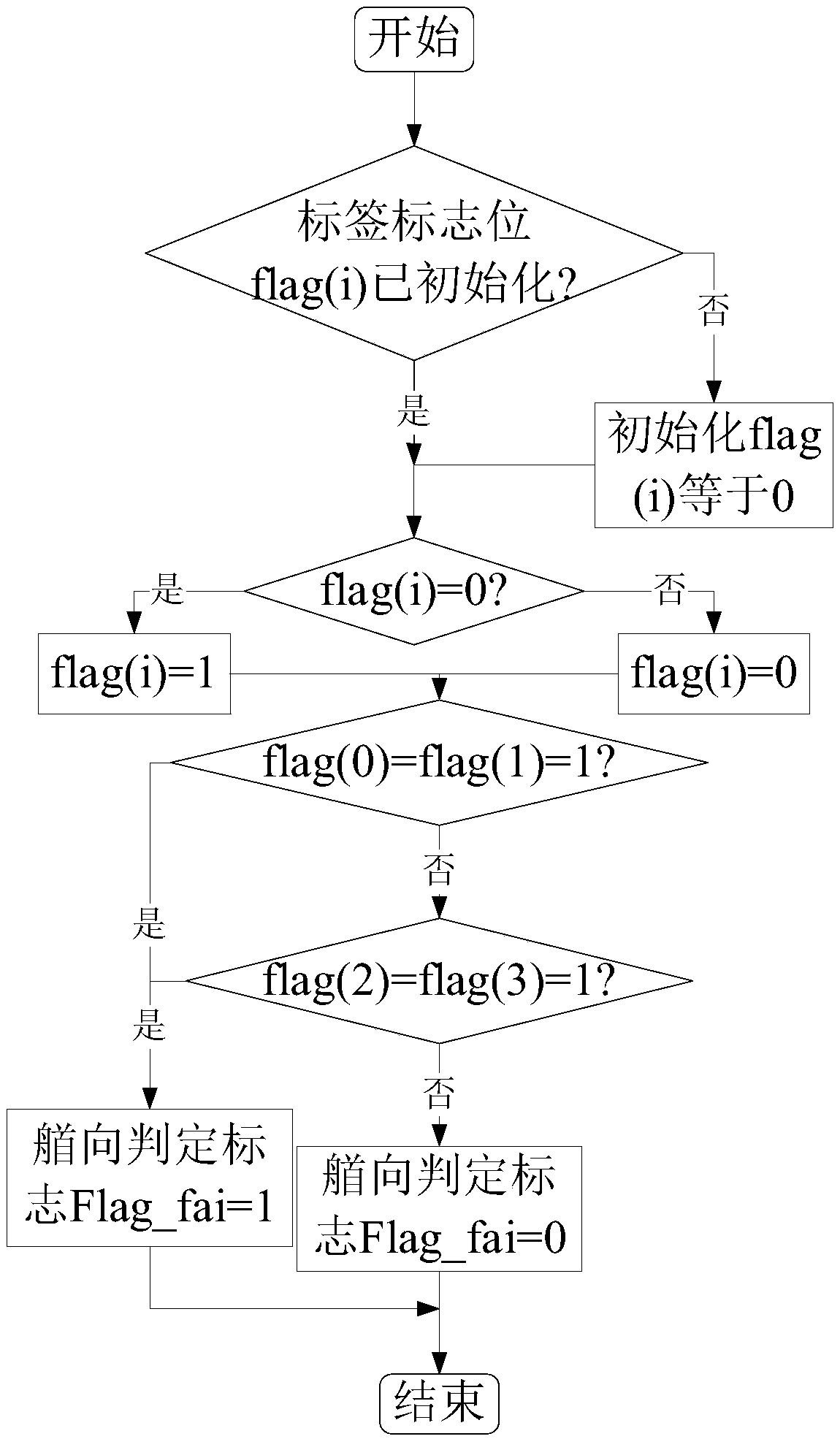
[0050] The invention proposes a UWB-based indoor positioning method and system for unmanned ship-borne speed measurement and direction measurement. The main steps of the method include: (1) Obtain the position information pos(xi,yi) of the UWB positioning tag by the UWB indoor positioning device and perform threshold filtering and Kalman filtering; (2) Use the velocity calculation algorithm F_outvel(i ) to calculate the speed outvel, if successful, execute step (3), otherwise return to step (1); (3) make the speed prevel equal to the current speed outvel at the previous moment; (4) use the heading determination algorithm F_faigate(n, i) , to determine whether the heading judgment flag Flag_fai is equal to 1, if yes, execute step (5), otherwise return to step (1); (5) according to the number n of positioning tags on the unmanned boat and the curren...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More