

Remote control environment-friendly desilting robot
A remote control and robot technology, applied in the direction of earth moving machine/shovel, construction, etc., can solve the problems of low production efficiency, high labor intensity, and the inability of construction machinery to work.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to better understand the present invention, the present invention will be further described below in conjunction with specific embodiments and accompanying drawings.
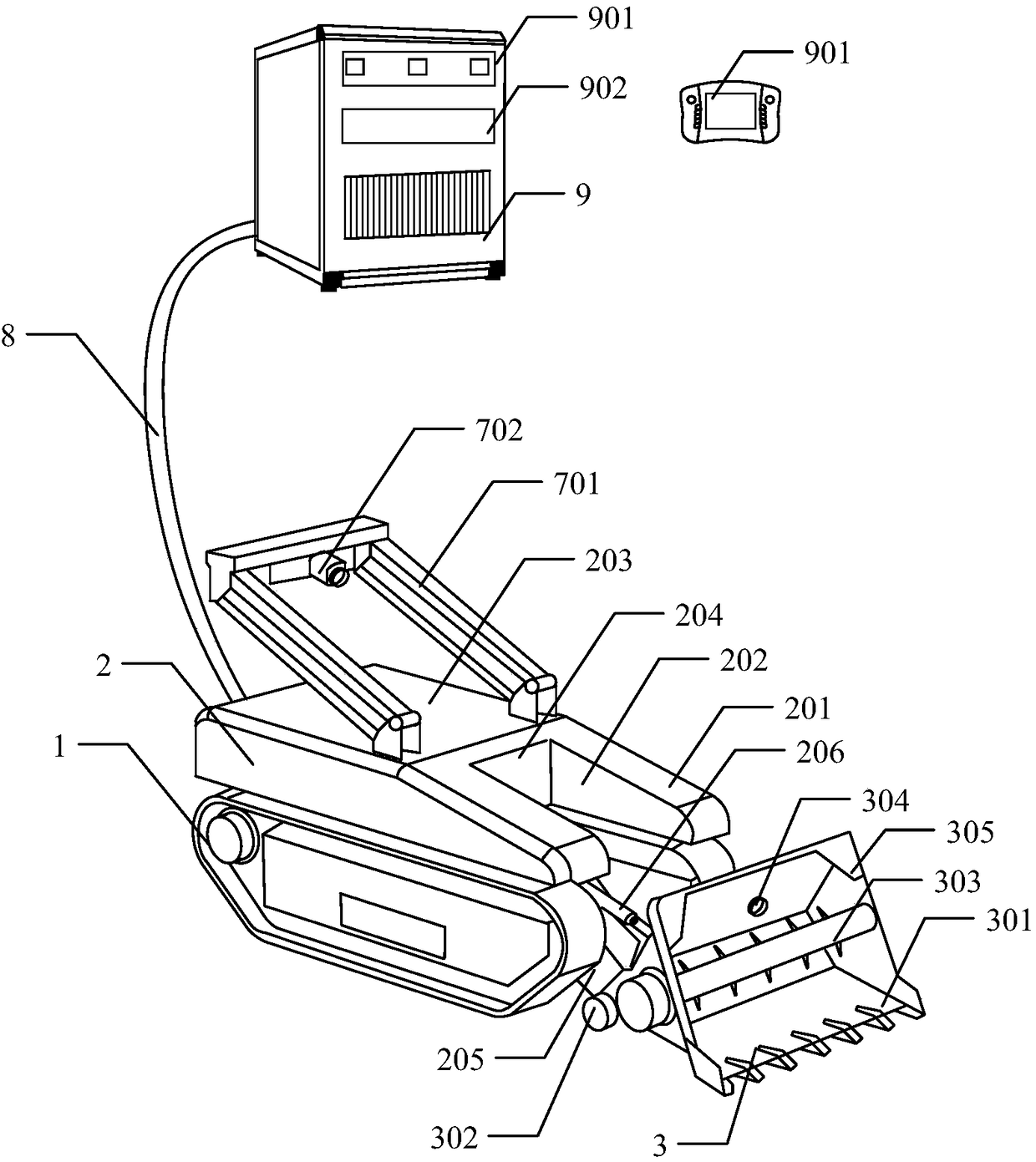
[0029] Such as figure 1 As shown, the present invention provides a remote-controlled environment-friendly dredging robot, which includes: a traveling assembly 1 and a dredging trolley body 2; the dredging trolley body 2 is arranged on the traveling assembly 1 .
[0030] The traveling assembly 1 constitutes the chassis of the remote-controlled environmental protection dredging robot, and the traveling assembly 1 drives the dredging trolley body 2 mounted on the traveling assembly 1 to move forward, backward or turn.
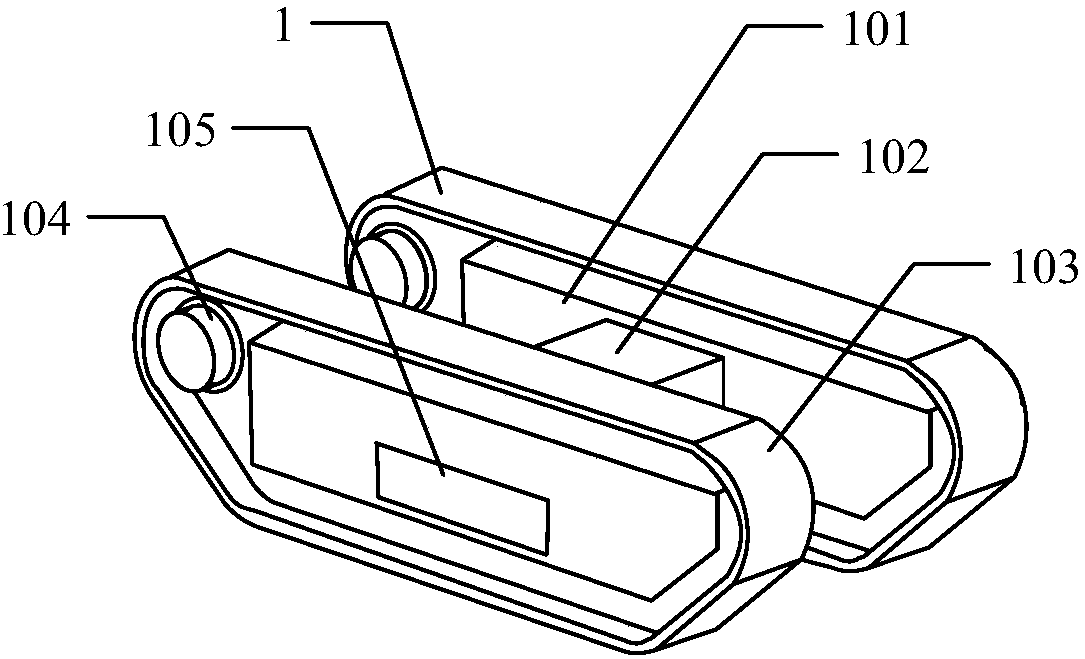
[0031] Further, the traveling assembly 1 includes a track frame 101, a track chassis 102, a track 103 arranged on the track frame 101, a track driving wheel 104 and a second drive motor (not shown in the figure), the second The drive motor drives the crawler belt drive wheel 104 to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More