

A multi-point preview method, a multi-point preview device and a target path tracking method thereof
A target path and preview technology, which is applied in the direction of instruments, geometric CAD, calculation, etc., to achieve the effect of suppressing the time lag of the actuator, ensuring the accuracy of path tracking, and improving the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
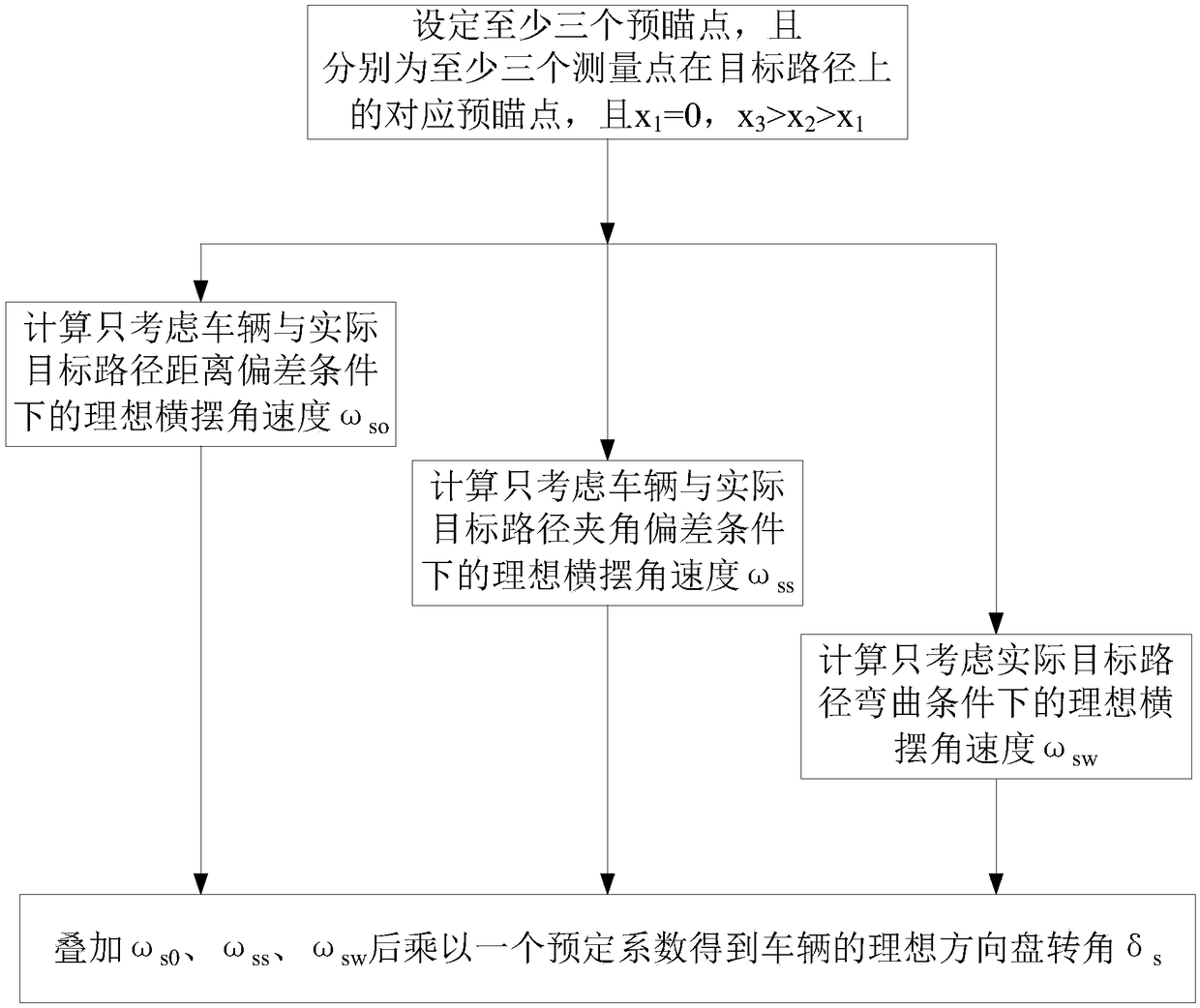
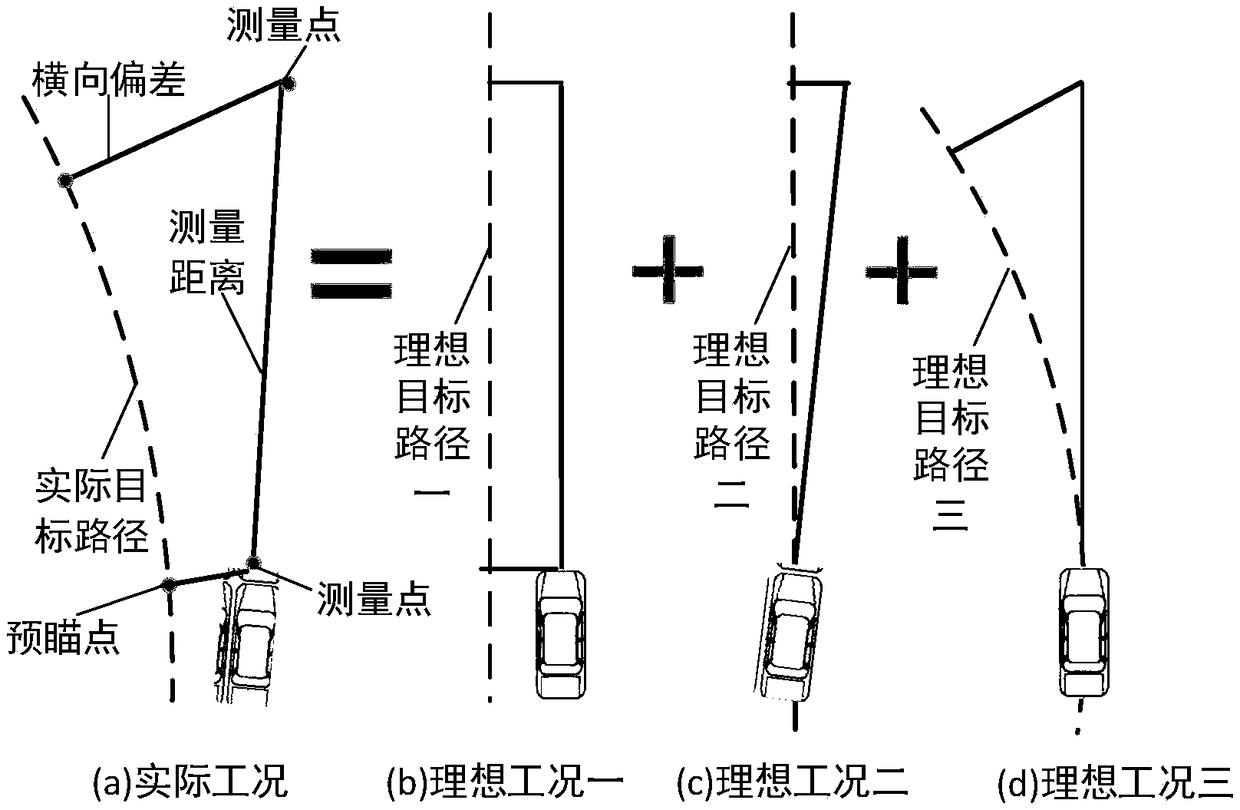
[0056] Set three measurement points, and the corresponding measurement distances of the three measurement points on the target path should satisfy: x 1 =0,x 3 >x 2 >x 1 ; The distance from the measurement point to the corresponding preview point is the lateral deviation y of the preview point 1 、y 2 、y 3 .
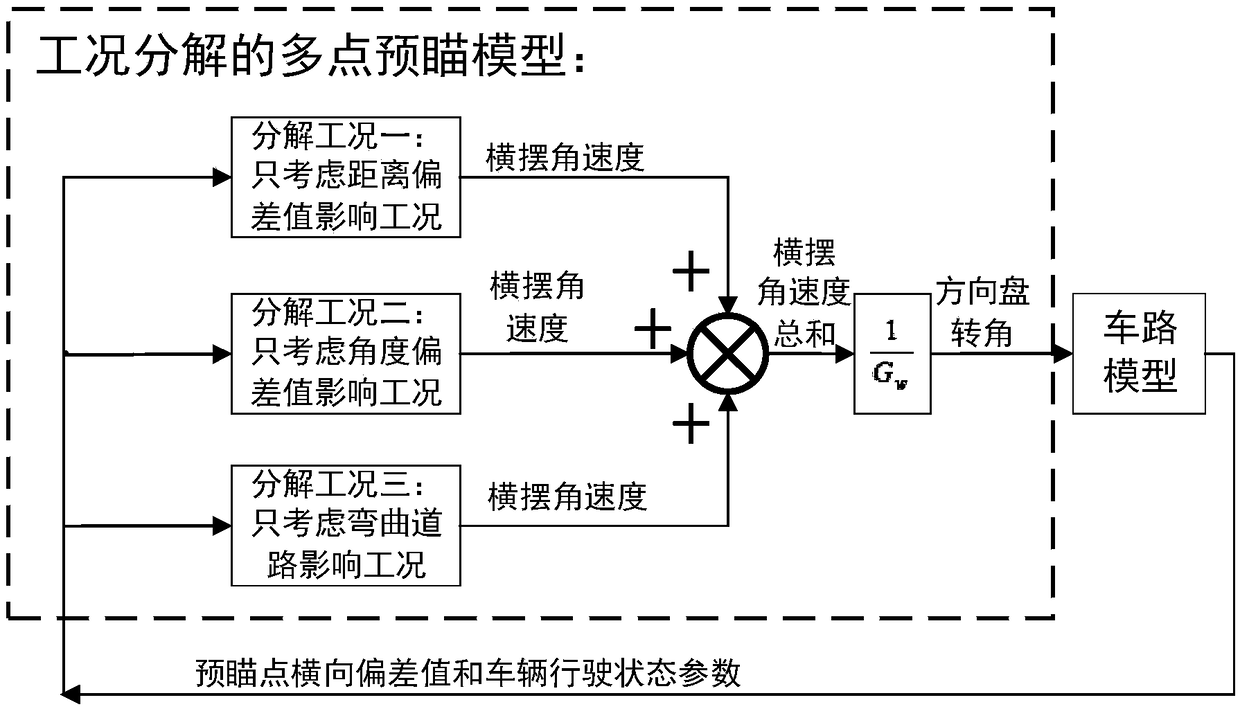
[0057] Decompose any complex actual working condition into three simple ideal working conditions for calculation respectively. The three simple ideal working conditions are: ideal working condition one is the working condition when only the distance deviation between the vehicle and the actual target path is considered; ideal working condition Working condition 2 is the working condition when only the angle deviation between the vehicle and the actual target path is considered; ideal working condition 3 is the working condition when only the actual target path is curved. Specifically include the following steps:
[0058] (1) Ideal working condition one
[0059] Cal...
Embodiment 2
[0070] Set four measurement points, and the corresponding measurement distances of the four measurement points on the target path should satisfy: x 1 =0,x 4 >x 3 >x 2 >x 1 ; The distance from the measurement point to the corresponding preview point is the lateral deviation y of the preview point 1 、y 2 、y 3 、y 4 .
[0071] Decompose any complex actual working condition into three simple ideal working conditions for calculation respectively. The three simple ideal working conditions are: ideal working condition one is the working condition when only the distance deviation between the vehicle and the actual target path is considered; ideal working condition Working condition 2 is the working condition when only the angle deviation between the vehicle and the actual target path is considered; ideal working condition 3 is the working condition when only the actual target path is curved. . Specifically include the following steps:
[0072] (1) Ideal working condition one ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More