A novel automated prostate biopsy robot with telecentric motion
A robot and movement technology, which is applied in surgical robots, surgical manipulators, ovulation diagnosis, etc., can solve the problems of time-consuming prostate biopsy, many puncture needles, and large trauma to patients, and achieve high positioning accuracy, pain relief, and use convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0029] The invention is a novel automatic prostate biopsy robot with remote central movement, which is used to solve the problems of large trauma and easy infection in prostate biopsy.
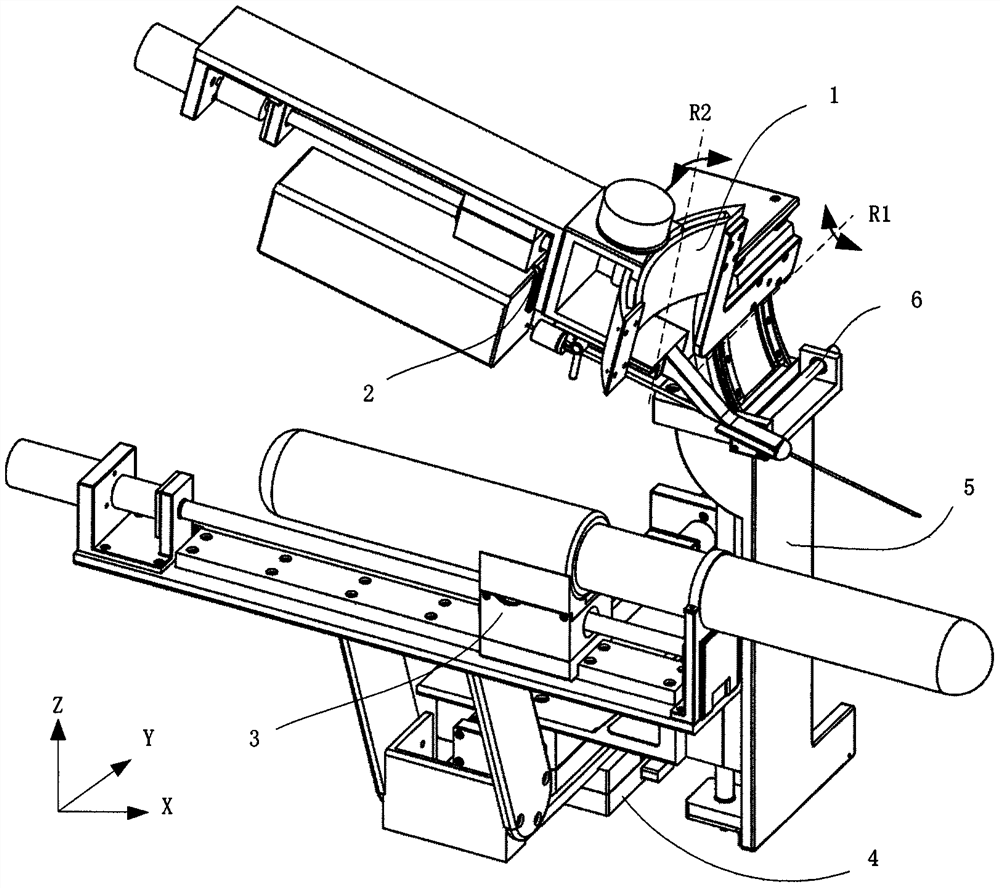
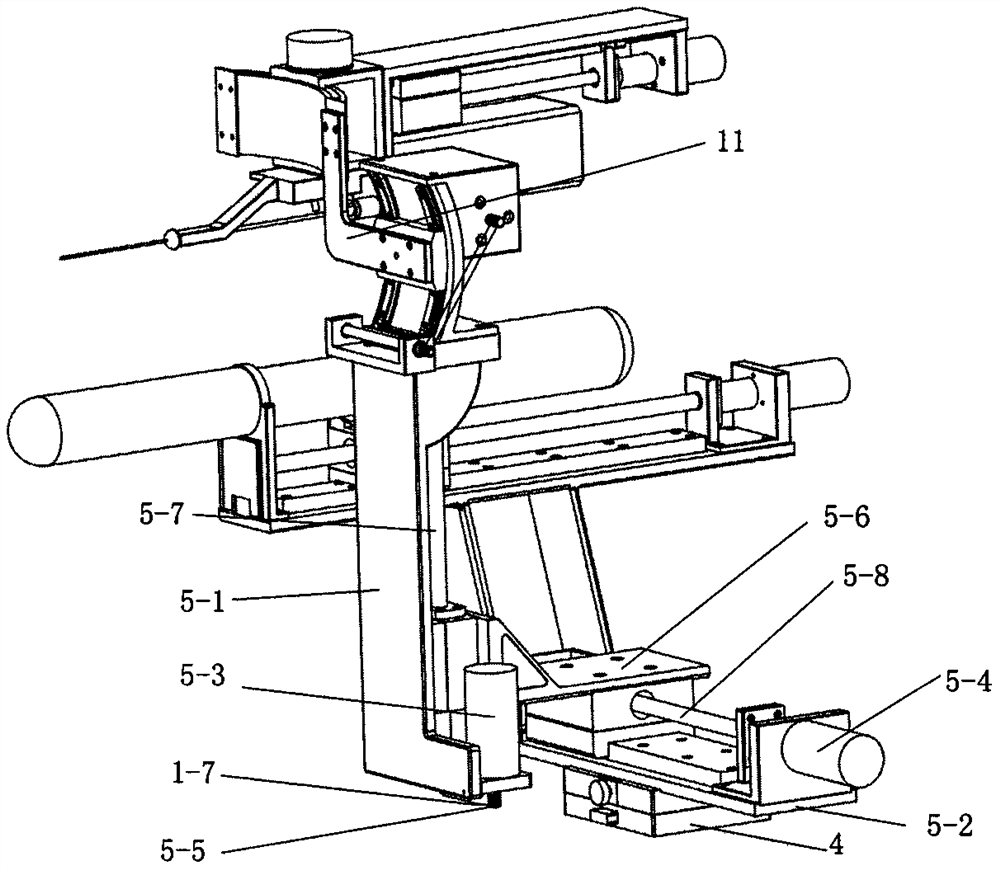
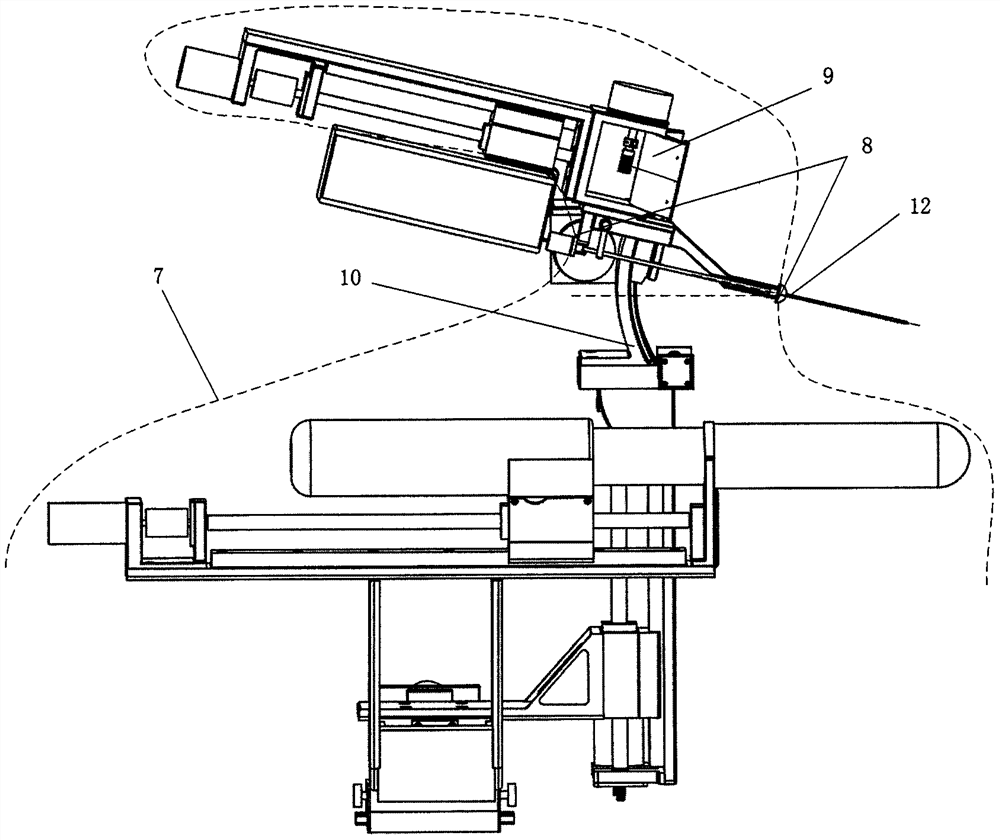
[0030] Such as figure 1 Shown is a schematic diagram of the overall structure of a novel automatic prostate biopsy robot with remote center movement in the present invention, the robot includes a biopsy needle attitude adjustment module 1, a biopsy needle depth control module 2, an ultrasonic probe imaging module 3, a robot fixing module 4, Biopsy needle positioning module 5, wire rope transmission module 6. The arc slide rail mechanism (attitude adjustment module) 1 is divided into a vertical arc slide rail module and a horizontal arc slide rail module. degrees of freedom. The arc centers of the vertical arc slide rail module and the horizontal ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More