

A cross-region deployment algorithm of substation patrol inspection robot under centralized control
A kind of inspection robot, centralized control technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to better understand the present invention, the present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
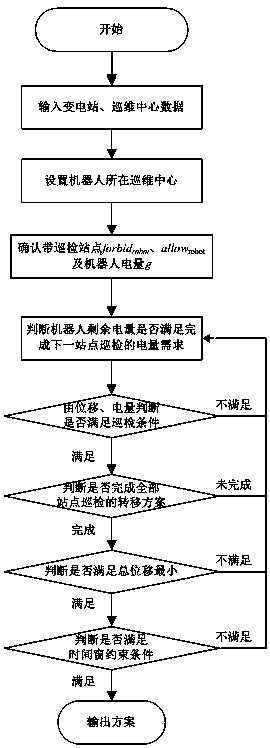
[0027] The problem of the centralized transfer process of substation inspection robot resources facing the provincial power grid can be described as: one inspection robot starts from the inspection center where it is located, goes to the substation inspection equipment respectively, and does not repeat the inspection of the substation and does not waste working time ( Charging, inspection, en route and return data), and return to the inspection center with the smallest distance.
[0028] Such as figure 1 As shown, a substation inspection robot cross-region deployment algorithm under centralized control includes the following steps:
[0029] (1) Determine the name of the substation that needs to be inspected, its corresponding coordinates, and the number of substations; determine the name, quantity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More