

A dual-function deep-sea unmanned submersible with variable wing shape and its working method
A submersible, dual-function technology, applied in the field of variable-wing dual-function deep-sea unmanned submersibles, can solve problems such as instability, bloated design of submersibles, and insufficient space for detection sensors, etc., and achieve a large volume-to-weight ratio Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
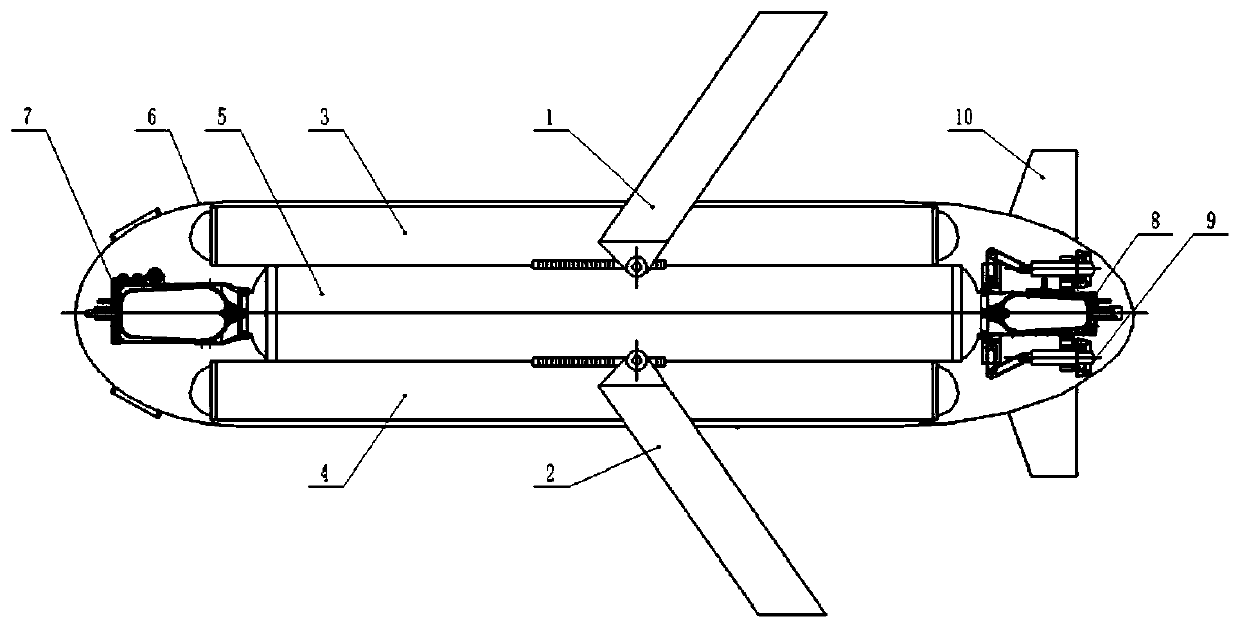
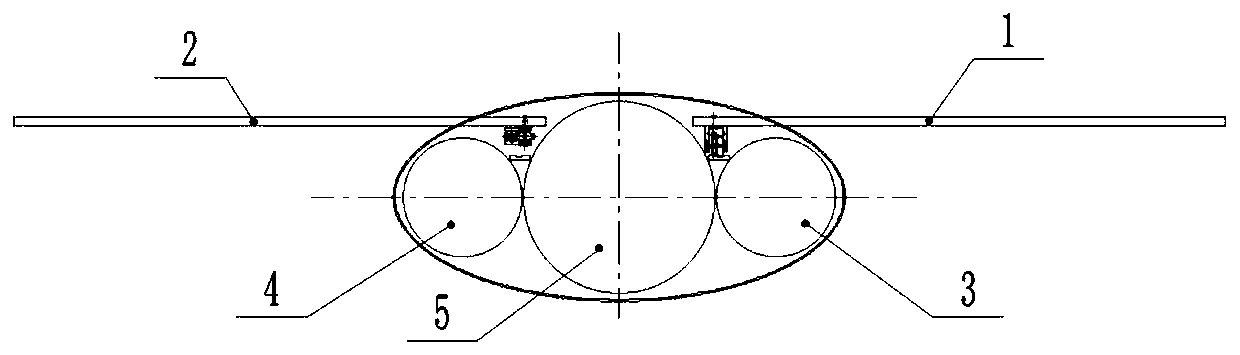
[0041] figure 1 It is a structural diagram of a variable-wing dual-function deep-sea unmanned submersible provided by an embodiment of the present invention, such as figure 1 As shown, the variable-wing-shaped dual-function deep-sea unmanned submersible includes: a variable-wing system, an openable propulsion system, and a distributed pressure-resistant system.
[0042] The openable propulsion system includes an openable propeller 9 located at the tail of the submersible; the openable propeller 9 is retracted into the cabin by an openable mechanism when the submersible is gliding, so as to reduce resistance. The openable and closable propulsion system may include: an openable and closable tail diverter cabin, a large depth and high-efficiency watertight propulsion unit, and an openable and closable moving mechanism. The openable tail diver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More