

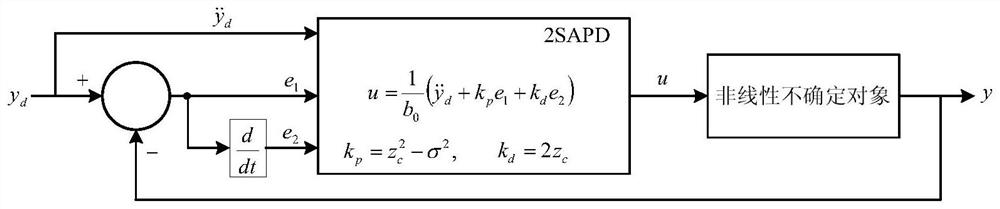
A Two-speed Adaptive Proportional-Derivative Control Method
A control method and self-adaptive technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problem of PD parameter tuning that plagues the field of control science and control engineering, the irrationality of PD control law models, and the lack of coordinated control Scientific ideas and other issues, to achieve good anti-disturbance robust performance, simple structure, good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] 1. Mapping ideas from non-affine nonlinear uncertain systems to linear uncertain systems
[0026] Suppose a second-order nonlinear uncertain system model is:
[0027]
[0028] Among them, y 1 ,y 2 ∈R is the two states of the system, u∈R is the control input of the system; f(y 1 ,y 2 ,t) and g(y 1 ,y 2 ,t) is an uncertain smooth function of the system, and g(y 1 ,y 2 ,t) is a non-negative function; d is an external disturbance; y=y 1 is the system output.
[0029] Define the unknown sum perturbation state (also called the expansion state) y 3 for:
[0030] the y 3 =f(y 1 ,y 2 ,t)+d+g(y 1 ,y 2 ,t)u-b 0 u (2)
[0031] Then formula (1) can be mapped to the following linear uncertain system:
[0032]
[0033] Among them, b 0 ≠0 is the control coefficient, by the function g(y 1 ,y 2 ,t) the variation range is determined.
[0034] Since system (3) is an equivalent map of system (1), the controller designed by system (3) can effectively control syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More