

Trajectory tracking control method for submarine flight nodes with preset performance based on disturbance observer
A technology of disturbance observer and preset performance, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as not considering the influence of modeling uncertainty OBFN
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0039] Specific embodiment one: the submarine flight node track tracking control method based on the preset performance of the disturbance observer comprises the following steps:
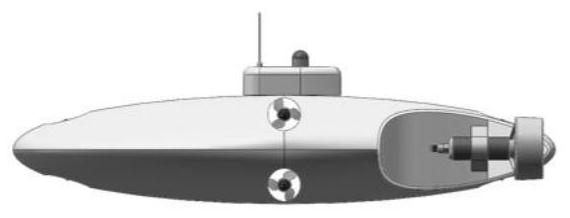
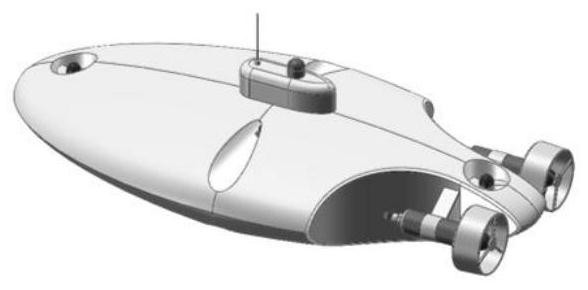
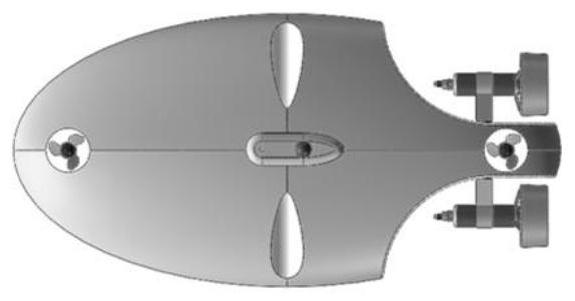
[0040] Motion coordinate system (G-xyz): The origin G is taken at the center of gravity of the OBFN, and the x-axis, y-axis and z-axis are respectively the intersection lines of the waterplane, transverse section and mid-longitudinal section passing through the origin.
[0041] Inertial coordinate system (E-ξηζ): The origin E can be selected at a certain point on the sea surface, the Eξ axis and Eη axis are placed in the horizontal plane and are perpendicular to each other, and the Eξ axis is positively pointing to the true north. .Eζ. is perpendicular to the Eξη plane, pointing to the center of the earth.
[0042] Fossen outline six degrees of freedom nonlinear dynamic model:
[0043]
[0044]
[0045] In the formula: M is the mass inertia matrix, η=[x, y, z, φ, θ, ψ] T Indicates the six-de...
specific Embodiment approach 2
[0161] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the specific process of setting up the Fossen outline six-degree-of-freedom nonlinear dynamic model in the described step one is:
[0162] The origin G of the motion coordinate system (G-xyz) is taken at the center of gravity of the OBFN, and the x-axis, y-axis, and z-axis are the intersection lines of the waterplane, transverse section, and middle longitudinal section passing through the origin, respectively;
[0163] The origin E of the fixed coordinate system (E-ξηζ) is selected at a certain point on the sea surface. The Eξ axis and Eη axis are placed in the horizontal plane and are perpendicular to each other. Heart;
[0164] Fossen outline six degrees of freedom nonlinear dynamic model:
[0165]
[0166]
[0167] Where η=[x,y,z,φ,θ,ψ] T Indicates the six-degree-of-freedom position and attitude of the OBFN in the fixed coordinate system, where x is the displacemen...
specific Embodiment approach 3
[0169]Specific embodiment three: what this embodiment is different from specific embodiment one or two is: in described step 2, the Fossen outline six degree of freedom nonlinear dynamics model that step 1 establishes carries out the dynamics model conversion of OBFN, obtains the OBFN Dynamic model, the specific process of determining the tracking error equation of OBFN according to the dynamic model of OBFN is:
[0170] The fault effect of the propeller of OBFN is expressed in the form of a thrust distribution matrix, which is defined as ΔB; therefore, the actual control force and moment are rewritten as τ+Δτ:
[0171] τ+Δτ=(B 0 -KB)u=(B 0 +ΔB)u (5)
[0172] In the formula, B is the thrust distribution matrix of OBFN, τ is the actual control force of the thruster of OBFN, Δτ is the influence value of thruster failure on thruster thrust, K is a diagonal matrix, and its element k ii ∈[0,1], represents the corresponding propeller fault degree, where 1 represents the highest f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More