

Autonomous underwater robot propeller fault-tolerant control method based on sliding mode algorithm and thrust secondary adjustment
An underwater robot, sliding mode algorithm technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as reducing the priority of the use of faulty thrusters, and the thrust cannot be adjusted in time, so as to avoid further deterioration. , reduce energy consumption, overcome the effect of obvious chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
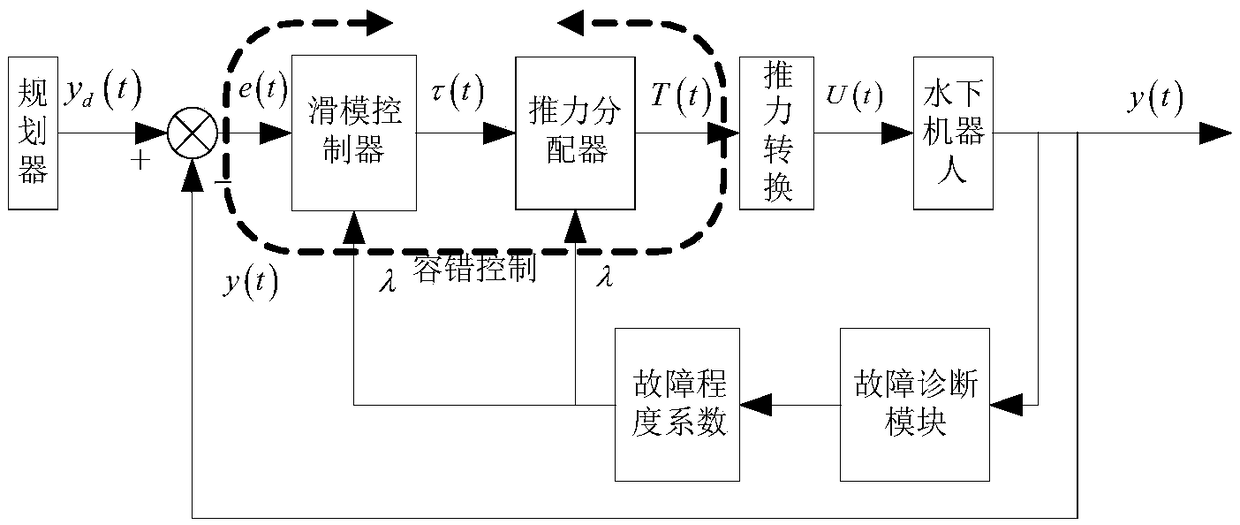
[0040]The fault-tolerant control method of autonomous underwater robot propeller based on sliding mode algorithm and thrust secondary adjustment, firstly, in order to solve the problem of chattering in the sliding mode fault-tolerant control of autonomous underwater robot, and the switching gain and boundary layer thickness are both Chattering and tracking accuracy are affected, and parameters are difficult to choose. Use a bipolar function instead of a sign function to realize adaptive adjustment of switching gain and boundary layer thickness to weaken the chattering phenomenon of sliding mode fault-tolerant control; for sliding mode fault-tolerant Control method In the fault-tolerant control of autonomous underwater robots, there is a problem of static difference between the actual value and the expected value of the state quantity. A fault-tolerant control method com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More